发布时间:所属分类:科技论文浏览:1次
摘 要: 摘要:针对传统输电线路除冰方法效率低和安全性差的问题,提出了一种气动式输电线路除冰机器人。该机器人采用三臂对称结构,能够在输电线路上高效除冰并越障行走。在此基础上,采用齐次坐标变换法进行机器人的运动学分析,包括机器人运动学正、逆方向的求解,建立了机
摘要:针对传统输电线路除冰方法效率低和安全性差的问题,提出了一种气动式输电线路除冰机器人。该机器人采用三臂对称结构,能够在输电线路上高效除冰并越障行走。在此基础上,采用齐次坐标变换法进行机器人的运动学分析,包括机器人运动学正、逆方向的求解,建立了机器人在越障过程中手臂位姿与各关节变量之间的关系,并在 ADAMS环境下对机器人跨越悬垂线夹过程进行运动学仿真。仿真结果和线路运行试验验证了机器人越障的可行性。
关键词:气动;除冰机器人;运动学分析;越障
0 引言
采用高压和超高压架空输电线路是长距离输配电的主要方式。近年来,输电线路冰灾事故在我国频发,严重危及电网安全可靠运行,因此,对输电线路进行日常的巡检以及恶劣气候条件下的除雪除冰是十分必要的。作为电力特种机器人研究领域的最新研究课题之一,输电线路除冰机器人在国内外的研究尚停留在起步阶段,各项技术研究还未建立统一的标准。加拿大魁北克水电研究院研制成功的 HQ LineRover遥控除冰小车,是国外最早问世的除冰机器人。目前国内对于除冰机器人的研究还没有成熟的产品出现,已经开展相关研究工作的学术机构主要有武汉大学、湖南大学、山东科技大学等。
在借鉴国 内 外 除 冰 机 器 人 研 究 成 果 的 基 础上,本文提出了一种气动式输电线路除冰机器人。该机器人将先进的机器人技术与基于铣削原理的机械除冰方法有机融合起来,结合以工业母版为控制核心的智能控制系统,能够自主地跨越高压线上 各 种 障 碍,实 现 高 压 输 电 线 路 的 高 效 除 冰。同时,该机器人也可以携带相关检测工具,完成高压输电线路的巡检工作。
1 除冰机器人机械结构
1.1 整体设计方案
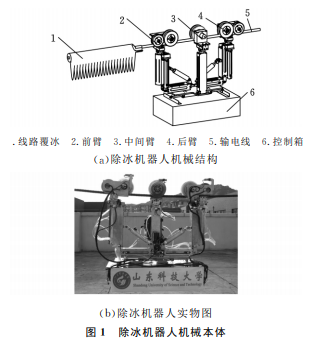
根据输电线路的结构、作业任务的分 解 以 及前后两个方向行走的要求,除冰机器人采用三臂对称 结 构,前后臂结构相同,分 别 由 行 走 驱 动 机构、铣削除冰机构、柔性伸缩气动机械臂和刹车制动机构组成。中间手臂不设除冰机构,其他结构与前后手臂相同[1-2]。三臂 对 称 安 装 在 机 体 平 台上,平台下面悬挂以控制箱为配重单元的重心调节装置,该机器人的机械机构如图1所示[3]。
与双臂式结构相比,三臂式除冰机器 人 在 越障过程中,通过调整前臂和重心调节机构实现越障过程中重心的平稳变化,不需要进行复杂的空中姿态的调整,降低了控制的难度,提高了越障的可靠性。但是,三臂式结构增大了机器人整体的质量,因此,本文选用压缩空气作为动力源,以气动驱动的方式使各手臂完成伸缩、行走、越障等动作,简化了传动机构的设计,大大地减小了机器人整体的质量。机器人整机的质量不大于50kg,并具有以下特点:①可实现缓冲,对冲击负载和过负载有较强的适应能力;②动作迅速、可靠,成本较低;③工作环境适应性好,可工作在恶劣环境中。
1.2 除冰机构设计
覆冰是由包裹在线路上的冰层以及下面的冰凌组成的,本文针对覆冰实际存在情况,采用机械除冰法,设计了一种基于金属高速铣削原理的除冰机构,由切削刀具组成的组合切割刀可实现高效切除高压输电线路冰层的作业要求,机器人除冰作业示意图见图2。
相关知识推荐:机器人领域普通期刊推荐http://www.qikansky.com/lwcommon/31849.html
由组合切削刀具组成的高速铣削除冰装置工作时,不仅要实现对冰层的高效切削,而且必须保证不能割伤高压输电线路。因此,组合切削刀由6片切削刀片、4个垫片和2块防切削板组成[2]。当线路冰层被切除后,两边对称的保护板会卡在高压电线上,实现切削刀具与输电线路的隔离,从而保证输电线路的安全。经过试验,这种复合除冰方式可以高效、相对彻底地清除覆冰,并保证线路的完好。为了简化结构,使整体更加紧凑,设计中将铣削除冰机构和行走结构设计为一个模块,除冰机构和行走驱动装置如图3所示。
2 除冰机器人运动学分析[4]
2.1 机器人正运动学解
除冰机器人的机械臂具有5个自由 度,包 括肩关节、肘关节的旋转(旋转角度用θ1 和θ3 表示)和水平伸缩臂、垂直伸缩臂、腕关节的伸缩(伸缩距离用d2、d4 和d5 表示)。结合该机器人的具体结构,本文采用D-H法进行机器人运动学的分析。首先,建立图4所示坐标系,O0X0Y0Z0 是固定在基座(控 制 箱)上 的 坐 标 系,O1X1Y1Z1 是 肩 关 节坐 标 系,O2X2Y2Z2 是水平伸缩臂坐标系,O3X3Y3Z3 是肘关节坐标系,O4X4Y4Z4 是垂直伸缩臂坐标系,O5X5Y5Z5 是腕关节坐标系。
其次,根据图4建立的坐标系,列出了上述坐标系对应的D-H 参数,即连杆长度ai、连杆扭转角αi、连杆偏移量di 和关节角度θi,见表1。求解机械臂各个关节变量的位移或者角度值。
3 除冰机器人越障规划及仿真
除冰机器人的越障是通过模仿人体遇到线路障碍时,从线路下方越障的动作序列实现的。本文采用 ADAMS软 件 对 机 器 人 三 维 模 型 进 行 建模、仿真和分析,机器人跨越悬垂线夹的动作规划如图6所示。
机器人行走过程中,前臂上的摄像机 和 超 声波传感器用于判断障碍物的类型和距离。当机器人遇到悬垂线夹或绝缘子串时,机器人停止前进(图6a),首先,前臂垂直伸缩臂上升,手掌开合机构打开,使行走驱动和除冰机构脱线,同时重心平衡机构后移至后臂和中间臂下方(图6b),然后机器人在中 间 臂 和 后 臂 行 走 电 机 的 驱 动 下 继 续 行走,直到中间 臂 遇 到 障 碍(图6c),此 时 前 臂 垂 直伸缩 臂 下 降,手掌开合机构闭合,实 现 前 臂 抱 线(图6d),调节重心平衡机构至初始状态。中 间臂、后臂的越障方式与前臂基本相同,即:中间臂上升、脱线,机器人前行至后臂遇到障碍,中间臂下降抱线;后臂上升、脱线,机器人前行至后臂越过障碍,后臂下降抱线。最后,机器人整体完成越障(图6e)。
仿真结果表明,机器人可以通过各关节的协调完成越障,从而验证了机器人越障的可行性和步态规划的合理性。
4 线路试验验证
为 验 证 除 冰 机 器 人 越 障 的 可 行 性,采 用110kV 标准钢芯铝绞线,在实验室环境下搭建模拟线路。该模拟线路包含实际输电线路的障碍类型,如悬垂线夹、防震锤等,机器人实际越障试验如图7所示。
试验结果表明,该机器人样机可自主跨越悬垂线夹等障碍物,动作迅速、可靠,验证了样机设计的正确性。
5 结语
本文提出 了 一 种 气 动 式 输 电 线 路 除 冰 机 器人,采用D-H 法对机器人进行运动学分析,并在ADAMS环 境 下 对 机 器 人 越 障 过 程 进 行 模 拟 仿真,仿真结果和线路运行试验验证了样机设计的可行性,为机器人的工程应用提供了一定的依据。随着机器人各种性能的不断完善和人们对输电线路可靠性的要求越来越高,其发展前景将是非常广阔的。——论文作者:王吉岱1 连金玲1,2