发布时间:所属分类:科技论文浏览:1次
摘 要: 摘 要: 使用软件无线电 SDR 平台进行被动的信号采集,基于带通采样算法,用较低的采样率对无人机信号进行采样。分析得到无人机和遥控器采用 5. 8 GHz 无线技术,采用跳频的方式,共用同一频段进行数据的收发。通过对调频序列的检测,采用有限状态机的方式得
摘 要: 使用软件无线电 SDR 平台进行被动的信号采集,基于带通采样算法,用较低的采样率对无人机信号进行采样。分析得到无人机和遥控器采用 5. 8 GHz 无线技术,采用跳频的方式,共用同一频段进行数据的收发。通过对调频序列的检测,采用有限状态机的方式得到无人机的检测结果。通过两路信号的同时检测,利用相位差信息得到无人机出现的大致方位。
关键词: 无人机; 信号检测; 无线技术; 软件无线电
0 引 言
随着无人机民用化过程的加速,无人机的价格更加亲民,普通民用航拍无人机越来越多地出现在日常生活中。而随之而来的最大的挑战是个人隐私、商业和政府机密可能面临的被无人机监视的问题。因此,如何能够检测到无人机对于私密空间的入侵,是个人和公司都需要面临的首要问题。只有检测到无人机的入侵,才能针对其展开下一步的反入侵措施。
由于民用无人机体积较小,采用传统的雷达技术很难检测到无人机。但无人机仍可以通过多种方式进行检测,包括: 使用摄像头进行图像识别; 使用音频传感器进行音频指纹识别[1]; 对无人机和遥控器之间的控制和图传信号进行检测等。前两种检测方式,在机器学习技术飞速发展的今天,有很好的开发前景。但这两种方式都需要大量的数据进行学习,对于普通开发者来说难以获得这些数据。而控制和图传信号检测方法更为直接,但由于其工作的 2. 4 GHz 或者 5. 8 GHz 频段为公用频段,可能受到非无人机信号( 例如常见的 WiFi 信号) 的干扰,检测准确率易受影响。并且由于无人机通信技术是各无人机厂商的商业机密,无法预先知道其通信协议,进一步增大了开发难度。
现在面世的仅有如下几家的无人机检测产品。日本 Alsok 公司和澳大利亚的 Drone Shield 公司采用相同的音频指纹技术,能够检测 150 m 范围内入侵的无人机。德国 Dedrone GmbH 公司的 DroneTracker 无人机检测系统,同时使用声学传感器、高清摄像头、近红外摄像头和 WiFi 传感器,其中 WiFi 传感器最远能够检测 500 m 范围内的无人机。这些产品都是面向大型建筑的入侵保护,采用多个传感器检测信号,将信号传送至数据中心进行处理。特别是采用音频和视频的检测方 法,难 以 在 单 个 传 感 器 上 实 现。在 2015 年 GeekPwn 的开场项目中,有黑客利用破解遥控器 WiFi 信号的方法劫持了大疆精灵 3 代无人机[2]。
本文使用软件无线电平台,通过对无人机 - 遥控机通信信号的检测,实现实时的无人机探测。该系统仅需要“天线 + 无线电 + 电脑”的硬件组合,和已有系统相比更为小巧,无需大型的数据库和数据处理中心作为支持。由于缺乏对通信协议的进一步破解,仅能以有限的跳频频点检测来判断无人机的有无,这是该系统的不足之处。
1 系统方案
1. 1 方案比较与选择
1. 1. 1 无人机信号判别标准
方案 1 根据收到无人机信号的信号时域波形特征进行匹配( 已知部分无人机机型波形信号) ,进行时域信号相关度计算,通过实际测量定出合适阈值判别无人机。此方案为最初方案,实际实验中遇到的问题有: ①无人机信号普遍为调频信号,即信号频率随时间变化,故而难以进行信号频率匹配; ②无人机通信信号较微弱,而且高频段载波易被遮挡与散射,接收进来的信号信噪比较差,噪声对时域波形的影响较大,难以在低信噪比环境下进行有效的波形相关计算; ③时域波形相关性计算计算量较大,所耗费的时间较长,故而时效性差。
方案 2 根据接收无人机信号,对其进行 FFT 变换,通过其频域特征对其进行特征匹配识别。具体方案为首先建立已知无人机机型的通信信号数据库,接收无人机信号并进行跳频频点采集,随后对检测信号进行接收。由于无人机信号为跳频输出[3],因此在频域上显示为关于时间的窄带脉冲,通过比较并统计接收信号中无人机跳频频点出现的个数及相应次数,以及通过实际实验设置合适的阈值来达到判别无人机的效果。这种方案相较于方案 1 更加可靠,可以有效降低信噪比对于无人机识别的影响( 噪声功率谱平坦) ,而且设置合适的阈值也可以避免随机频点信号被误检测的情况。综合上述比较,本文最终选择方案 2 进行无人机检测。
1. 1. 2 无人机方位检测
实验提供的硬件为 YunSDR 无线通信收发器,其支持双通道信号源发送以及双通道信号接收,因此在实验中最多能通过两路接收信号的信息差别来判别无人机方位,这就从硬件层面上对方位检测的准确度进行了限制。而这两路信号的差别来判定无人机方位,也存在如下两种检测方案。
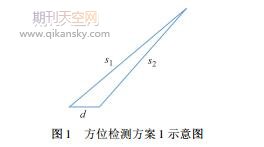
方案 1 如图 1 所示,通过两路天线接收的信号强度( 幅度) 信息进行比较,信号源强度衰减在理想无遮挡、散射、多径情况下与距离的平方成反比。因此,只要能够测定无人机信号随距离的强度衰减公式,即可根据两路信号的强度来确定出无人机与两路天线之间的距离进而定位。实际实验中的困难为: ①实验用天线的信号增益无法达到完全一致,故两个天线自身就存在不同的信号强度衰减距离公式,造成距离的测定误差较大; ②两天线之间能够实现的距离较近,故信号源到两天线的距离差十分小,信号强度因距离造成的差别十分微小,判别误差大; ③实际实验环境中不可避免地存在遮挡、多径干扰等因素,造成强度衰减不规律,难以用于定位。
相关知识推荐:无人机领域论文如何发表
无人机就是无人驾驶飞机,是国家正在大力研究和发展的行业。近些年来有关无人机领域论文是比较多的,但是由于是一个新的技术,许多从事无人机领域的人员对于论文怎么发表?在哪些期刊上发表了解得不是很多。本文小编给大家介绍下论文发表流程及投稿的期刊,供大家参考。
方案 2 由于通信信号的载波频段为 5. 8 GHz,故其信号波长约为 5. 17 cm,此距离在我们实验能够实现的两天线间距内,所以可以考虑如图 2 所示,采用接收两路信号的相位差作为定位无人机的判决标准[6]。具体测量两路信号相位差的方法拟采用噪声抑止处理后的两路信号,FFT 后的频域相位信息代表其相位计算相位差。理论上这样做的好处有: ①信号波长短,故定位精度高; ②相位信息受到环境的影响较小,故可以适应更复杂的检测环境; ③对天线增益差别要求较小,实验条件满足。
综合比较以上各优缺点,本文采用双通道接收信号相位差比较法定位。
1. 2 方案描述本系统使用的装置如下: 硬件系统为: YunSDR 双通道接收信号端,2 个 5. 8 GHz 频段贴片天线。软件系统为 Matlab。
整体实验方案为: 如图 3 所示,利用 YunSDR 双通道接收端口接收进双通道的无人机信号[5],两天线同轴放置并且间距约为 5. 8 GHz 载频信号波长 λ = 5. 17 cm。接收进两路信号后传入电脑利用 Matlab 软件进行后续处理。软件处理包括: ①输入信号进行快速傅里叶变换得到频率谱,对信号单峰频点进行比较并统计,判定是否为数据库内无人机信号; ②当检测到无人机信号后,对同一时段同频率的两路收入信号进行快速傅立叶变换相位采集作差,最终通过数学运算估算出无人机方位角。
2. 2 确定无人机方位
在检测无人机信号的实现基础上,使用 2 个 5. 8 GHz 天线接收信号,根据两路信号差计算无人机方位角。程序流程图在 3. 1 基础上稍作改变,见图 6,数据采集时由一路数据变为两路,数据变换模块对两路信号均做同样的变换,决策判断中判断无人机是否存在的部分不做改变,增加决定无人机方位部分。
3 测试方案与测试结果
3. 1 测试方案
( 1) 将一个无人机放置在离天线有一定距离的地方,考虑到遥控器发射的信号强度比无人机发射信号能量更大,将遥控器远离天线。测试当无人机开机时,系统是否能够检测到无人机; 无人机关机时,系统是否虚警。
( 2) 改变无人机与天线基线的夹角,测试系统是否能够在误差允许的范围内确定无人机方位角。
3. 2 测试结果
( 1) 在室内环境下测试,无人机与天线的距离在 15 m 之内,能够正确检测到无人机的存在,测试过程没有出现虚警。
( 2) 由于无人机信号带宽较大,YunSDR 的采样率不足( 最大为 100 MHz 量级) ,采样到的信号 1 个周期仅占极少的数据点( 3 ~ 7 个) ,因此直接做 FFT 得到的相位会有系统性的偏差[4]。此外加上噪声的影响,经过测试,计算得到的方位角有较大范围的跳变,目前暂时没有能够得到较为准确的方位。
4 结 语
本文基于 YunSDR 平台实现了一个无人机实时检测系统。通过采集 5. 8 GHz 频段附近的无线电信号,根据无人机通信的跳频序列,检测采集信号中是否包含了调频的子序列,进而确定是否有无人机入侵。本文提出了一种检测到无人机后确定其方位的方法,根据两个天线采集到信号的在最大能量频点的相位差得到无人机的方位,该方法的准确度和鲁棒性有待提高。此外,使用增益更高的天线将有利于提高本文系统的性能,提高检测无人机方位的准确度。检测无人机的前提是已测到各种型号无人机的跳频序列,这种方法在一定程度上限制了系统的实用性,改进的方向是学习无人机通信信号与空间普通信号相比,除跳频之外的其他特征,根据这些特征将无人机信号与空间背景信号区分,进而检测无人机。未来的研究方向包括如何有效滤除 5. 8 GHz 频段附近噪声,研究无人机信号的其他特征,以及采用另外的方法检测无人机方位。