发布时间:所属分类:科技论文浏览:1次
摘 要: 摘 要 在分析城市轨道交通列车传统定位方法的基础上,提出了一种基于无线感应编码电缆的高精度定位系统的设计方案,能实现对城市轨道交通列车的高精度定位和测速。阐述了该定位系统实现的原理,介绍了其系统结构构成,分析了各子系统的功能和工作内容,并以试验线为例
摘 要 在分析城市轨道交通列车传统定位方法的基础上,提出了一种基于无线感应编码电缆的高精度定位系统的设计方案,能实现对城市轨道交通列车的高精度定位和测速。阐述了该定位系统实现的原理,介绍了其系统结构构成,分析了各子系统的功能和工作内容,并以试验线为例设计了一套高精度列车定位系统。试验线应用结果显示,该高精度定位系统具有可行性和可靠性。
关键词 城市轨道交通; 列车定位; 无线感应; 编码电缆
城市轨道交通列车测速定位系统为列车牵引、列车制动、运行控制和安全防护提供速度与位置信号。测速定位系统所提供信号的准确性与可靠性是列车安全、稳定、可靠运行的保障和必要条件。此外,列车的便捷性与舒适性需求越来越高,对列车测速定位技术的精度和实时性也提出了更高的要求。
为满足测速定位系统的功能和性能要求,需要深入研究与分析现有的传统列车测速定位技术,并在此基础上提出符合实际需求的高精度列车测速定位系统方案。
1 传统的轮轨定位技术
列车的轮轨存在接触。在车轮与钢轨接触运转的过程中,测速电机将机械转速值转换为电压信号,并根据其输出的电压脉冲计算出列车的实时运行速度。这样,以较短的时间周期不间断刷新来获取列车实时运行速度数据,并对其作积分处理,从而获取列车运行距离,进而推断出列车与钢轨的相对位移。这就是传统的轮轨定位系统工作原理。
在传统的轮轨定位系统中,根据测速电机测速转换出的列车位移信息,仅能判断列车行进过的相对位移( 即相对位置) 。
事实上,传统轮轨系统借助于测速电机实现列车定位的方式也存在一定的缺陷: 一方面,车轮直径在最小磨损偏离为 770 mm、最大磨损偏离为 840 mm 的标准前提下,通过积分计算的相对位移必然存在误差; 另一方面,在车轮发生空转或打滑的情形下,列车的定位也会产生偏差。
除此之外,还有 GPS( 全球定位系统) 定位、无线扩频定位、漏泄波导管定位等常用的定位技术。相对这些技术,编码电缆无线感应定位技术更加精确可靠。
2 编码电缆无线感应定位技术
2.1 工作原理
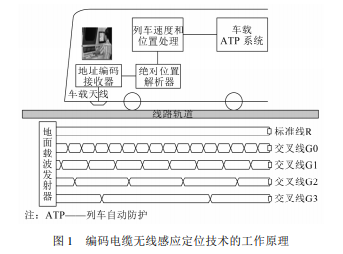
如图 1 所示,本文以 4 个地址的地址编码定位检测系统为例,来描述车载位置检测方式。
如图 2 所示,轨旁地面载波发射器采用同频率分时的方式,将信号发送给编码电缆标准线 R、交叉线 G0、交叉线 G1、交叉线 G2 及交叉线 G3。由于交叉线中存在电磁场,故当列车在交叉线缆上方行驶通过时,列车上的车载天线就会感应出耦合电磁场。通过这种电磁耦合感应的方式,地址信号被传送到列车车载天线。列车上负责接收信号的地址编码接收器,将接收到的信号与标准线信号进行比较。如果两者相位相同,则定义地址为“0”; 如果两者相位相反,则定义地址为“1”。
图 2 反映了地址选择原理。根据图 2 b) ,以地址 A2 为例,A2 中 G3、G2 及 G1 交叉线的信号相位同标准线 R 相同,交叉线 G0 的信号相位与标准线R 的信号相位相反,因此地址 A2 为“0001”,同理,地 址 A1 - A8 的 地 址 分 别 为“0000”、“0001 ”、 “0011”、“0010”、“1010”、“1011”、“1001”、“1000” ( 如表 1 所示) 。
在实现对特定长度区间内移动体定位的编码感应电缆中,其地址环线的典型设计是: G0 存在 21 -1 = 1个交叉点,其在该定位长度区间内共有 21 = 2 个环; G1 存在 22 -1 = 3 个交叉点,其在该定位长度区间内共有 22 = 4 个环; G2 存在 23 -1 = 7 个交叉点,其在该定位长度区间内共有 23 = 8 个环,……如此类推。故而,如果 1 组编码感应电缆共有 n 位地址环线,则其地址环线 Gn 的设计则应该存在 2n-1-1 个交叉点,其在能实现移动体定位的长度区间内共有 2n-1 个环。
2.2 定位系统布置方案
编码电缆的定位精度取决于其最小步长 W,且 W 的大小与定位精度成反比。受限于工程实际情况,W 无法做到特别小,其影响因素有天线箱制造尺寸存在误差、城市轨道交通列车运行过程中存在摆动现象、磁场分布不均匀性及环境干扰等。如果 W 取值过于小,则会减小电磁感应面积,进而会降低地址检测的信噪比,使地址的信号不稳定,读取地址出现偏差。根据工程经验,W 取 200.0 mm 时的效果较好。
W 取值与定位精度要求有关,电缆长度同编码电缆芯线的数量和 W 有关。具体关系为: 绝对定位精度 μ = W/2,编码电缆长度 L = 2nμ( n 为编码电缆芯线的数量) 。由此可知,当 W = 200.0 mm 时,μ = 100.0 mm。如果编码电缆地址线为 10 对( G0-G9) ,则当 W= 200.0 mm 时,L = 102.4 m。
相关知识推荐:城市轨道交通安全管理论文发表指导http://www.qikansky.com/lwcommon/26552.html
地址交叉线 G0 步长 200 mm,在 100 mm 开始交叉; G1 步长为 400.0 mm,在 200.0 mm 开始交叉; G2 步长为 800.0 mm,在 400.0 mm 开始交叉,…; G9 步长为 102.4 m,在 51.2 m 交叉一次。
3 定位系统设计
根据电磁感应原理而设计的基于编码电缆无线感应技术城市轨道交通高精度列车定位系统( 以下简为“高精度定位系统”) 总体结构图如图 3 所示。整个定位系统分为列车定位车载子系统、列车定位轨旁子系统及列车无线通信子系统三部分。
3.1 列车定位车载子系统
列车定位车载子系统具体包括车载天线、地址编码接收器、绝对位置解析器及列车定位车载控制器。
车载天线负责检测编码电缆中的电磁感应信号,将电磁感应信号发送给地址编码接收器。地址编码接收器负责根据收到的电磁耦合信号、已感应到的标准线基准信号,依次确定每个地址交叉线中感应信号的值,从而形成本次读信号周期获得的绝对地址编码。绝对地址解析器负责根据接收到的地址编码,通过计算方法或者数据库查询方法,唯一地解析出地址编码对应的线路位置信息。列车位置信息和检测时间,作为列车速度和位置控制器的处理参数,被用来确定列车当前位置、列车运行速度和列车运行方向。
3.2 列车定位轨旁子系统
列车定位轨旁子系统包括列车定位地面控制器、地面载波发射器、编码电缆等。
假设编码电缆中的地址交叉线为 10 根,则每段编码电缆覆盖范围最大为 102.4 m。在工程应用中,需要将线路轨道划分为多个区段。每个区段长度不超过 102.4 m,且每个区段配置 1 个地面载波发射器。合理布设的地面载波发射器是整个线路的列车定位轨旁子系统的主要组成部分。列车定位地面控制器负责实现地面载波发射器的工作分配和调度。
3.3 列车定位无线通信子系统
列车定位无线通信子系统包括车载通信控制器、车载天线基站、地面固定基站、地面通信控制器等。
在实际应用中,只有存在列车的线路区段,才需要地面载波发射器发送载波信号。因此,需要哪个地面载波发射器进入工作,是由列车定位地面控制器实现控制的。这就要求列车在运行过程中,需将检测到的自身定位信息通过车地定位无线通信子系统发送给地面控制器。
在实际工程应用中,列车定位无线通信子系统可借助于传统的无线通信技术来实现。
4 高精度定位系统的应用
本节以某试验线为例,设计 1 套基于编码电缆无线感应技术的高精度列车定位系统。该试验线全长 1.226 km。
由图 4 可见,对于试验线的地面站而言,每个地面站负责管理 4 组编码感应电缆,故每个地面站的辖区长度为 409.6 m。据此,整个试验线能被分为 3 个地面站,且地面站与地面站之间的编码感应电缆没有物理连接。因此,车载地址信息探测系统既要读取编码电缆的地址码,还要获取地面站的站码及其辖区内编码感应电缆组的编码,从而实现对列车绝对位置信息的准确获取。
该高精度定位系统虽提高了列车的定位精度,却增加了设备的数量,也增加了维护工作量,增加了费用支出。为解决这些问题,可在定位精度要求高的区段,按高精度定位系统要求布置轨旁设备; 在区间运行速度较高且定位精度要求低的区段,降低编码电缆的密度,降低定位精度,以减少轨旁设备,从而实现整体的优化。
5 结语
针对传统城市轨道交通列车定位系统的不足,本文基于编码电缆的地址交叉线无线感应技术,设计了适用于城市轨道交通列车的高精度定位系统。该定位系统可实现对全线路列车的精确定位,完全能够替代既有的轨道电路+应答器等定位方式。
由于定位信号采用无线感应的非接触工作方式,故没有机械接触磨损。其所采用的编码电缆以格雷码方式交叉铰链排列,可保证编码电缆芯线全称无重叠的交叉点,能够准确地检测到列车在全线路范围内的绝对地址,其检测精度可达 10 cm,甚至更高,能满足城市轨道交通列车精确定位的需求。
由于编码电缆采用特有的交叉扭绞结构及相位检测技术,能够消除供电电源开关过程中的电磁干扰,受环境噪音和接收信号电平波动影响小,能在室外的恶劣环境下可靠工作。——论文作者:田 斌
参考文献
[1] 陈进.感应无线地面检测位置原理与实现[J].电子测量与仪器学报,2009( 1) : 58.
[2] 程望斌,陈进,陈新.基于感应无线的高分辨率位置检测系统研究[J].自动化仪表,2011( 6) : 32.
[3] Micronor 公司.MR121 ZapFREE 型编码电缆[J].传感器世界, 2004( 3) : 46.
[4] 别文群,缪兴锋.基于编码电缆的自动化立体仓库的地址检测[J].兰州理工大学学报,2009( 2) : 88.
[5] 魏海丽.编码电缆位移传感器自动定位技术在自动化仓库管理中的应用[J].物流技术,2014( 14) : 70.
[6] 赖建奇.编码电缆定位技术在重钢焦化厂中的应用[J].重钢机动能源,2014( 4) : 7.