����ʱ�䣺�������ࣺ�Ƽ����������1��
ժ Ҫ�� ժҪ :�ڷ�����ѹ�����·Ѳ�칤�����ص�������ѹ�����·Ѳ�����˵ķ�չ��״�ͷ�չ���ƵĻ�����, ��ϸ�ѹ�����·�ϸ�����ȥ������, ��Ҫ��������Ƶ�һ�����͵ĸ�ѹ�����·����������.�û����˽ṹ��, ��������������ȶ�������, �ܹ��Ϻõؽ������Խ�ϵ�
����ժҪ :�ڷ�����ѹ�����·Ѳ�칤�����ص�������ѹ�����·Ѳ�����˵ķ�չ��״�ͷ�չ���ƵĻ�����, ��ϸ�ѹ�����·�ϸ�����ȥ������, ��Ҫ��������Ƶ�һ�����͵ĸ�ѹ�����·����������.�û����˽ṹ��, ��������������ȶ�������, �ܹ��Ϻõؽ������Խ�ϵ�����, ���������ϵij�������, ���й㷺��Ӧ��ǰ��.
�����ؼ���:����������; �����· ; Խ��; ����
���������ҹ����õĸ��ٷ�չ, ����ѹ�����������·Խ��Խ��, ��·���ȴ�Խ�ĵ����������Ӹ���, �羭���������ˮ�⡢�����ͳ�ɽ����, ����·ά�������ܶ����� .�������϶�����������, �ҹ��ƹ��ԭ������һ��������������������ڡ����ڡ����, ��ɼܿ������·����, ʹ��·�趯 ������ ������, �������ߵ���, ʹ�����ṹ��ƻ�, ��ȫ�����ܵ�������в. �ڽ��������, Ѱ��Ա�ô�������˻��������Ƶľ�Ե��ֻ��Ϊ���ٵ�һ���ָ�����·����, �˹������кܸߵ�Σ���� [ 1] .
�����ڹ���, һЩ���ҵĵ���������������ҹ�����, ����һЩ���ҵ�������Ӷ���, Ϊ�˱�֤����ϵͳ�Ŀɿ���, ��߸�ѹ����߳�����Ч��, ������ʧ, ά�����˵İ�ȫ, ����һ�ֿ��������������˽��г�����ҵ�������豸һֱ�ǹ���������о����ȵ� .���, ���ư�ȫ��Ч�ij�����е�Դ����˽��е��߳������нϺõ�Ӧ��ǰ����ʵ������ .��������ij��������˼�Ϊһ�ּȰ�ȫ����Ч�ij���װ�� .
����1 ��ѹ�����·���������˵Ļ�������
������������һ�����ӵĻ���һ�廯ϵͳ, �漰����е�ṹ���Զ����� ��ͨ�� ����������Ϣ�ںϡ���Դ�����ȶ������.����е�ṹ������ϵͳ�Ļ���, Ҳ��Ŀǰ��Լ������ʵ�û�������ϰ� .���������������һ�����͵�ʵ�õĸ�ѹ�����·����������, ����������һЩ����:( 1) �������������Ԥ����ٶȽ���ƽ������;( 2) ����һ������������;( 3) �ܹ���Խ������ϵķ���, ��, ��Ե�ӵ��ϰ���;( 4) �ܹ���ȥ������ϵı�ѩ.
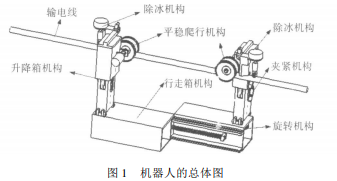
���������˵IJ�������:�����˵����Ϊ 600 mm × 328 mm ×526 mm( �� ×�� ×��) ;����ԼΪ 15 kg ;ƽ�����е��ٶ�ԼΪ 375 m/h .�����˵Ļ�е�ṹ��Ҫ����ƽ�����л�����Խ�ϻ����ͳ�������, ������ͼ��ͼ 1 ��ʾ.
����1 .1 ƽ�����л��������
����Ϊ��ʹ�����˵�ǰ���ٶȴﵽ���, ��ǰ��ƽ��, �˻����˲���������ʽ����, ��ͼ 1 �е�ƽ�����л���.
����1 .2 Խ�ϻ��������
���������˵�Խ�ϻ�����Ҫ�������������������������н���������ת������� .
����( 1) ���������.������������������߷�ʽ�Ĺ�˼�����������߷�ʽ .����Ҫ����������������Լ������ݸ˺���ĸ���, ��ͼ 2 ��ʾ.
����( 2) ��������� [ 2] .�����˵�������ʽҲ�����ݸ��������������ķ�ʽ.�������������Ҫ���Ϊ�����������������Լ������ݸ˺���ĸ���, ��ͼ 3 ��ʾ .
����( 3) �н�����[ 3] .�н������ļн���ͼ��ͼ 4 ��ʾ, 1 Ϊ����, �������������ϵ������������л���, 2 Ϊ���, �����������������������д���, ���������н�������������������IJ������»���, �Ӷ������н���˳ ����ʱ����ת, 3 Ϊ��Բ�β�, ���н��е�������λ��ʱ, ��н����� .�н��е������Ǽн�����, ���˶���ʽ�ļ�ͼ��ͼ 6 ��ͼ 7 ��ʾ.�н��е��ɿ�״̬��ͼ 5 ��ʾ, �н��еļн�״̬��ͼ 6 ��ʾ .�н��н����н�, ��ɱ�֤��������Խ��ʱ���ᷢ�����������෭.
����( 4) ��ת���� .��ת�������õ���һ�Գ��ֵĴ���, ���ְ�װ���������������������, ��ͼ 7 ��ʾ. 1 Ϊ�����, �Լ����ӵķ�ʽ�� 2 ����, 2 Ϊ��������������������, ���������ǽ�������������������, 3 ΪС����, ����������� 4 ����, 4 ΪС���ֵ��������, 5 Ϊ��ĸ, 6 Ϊ����, 5 �� 6 ����������ס������.��С������תʱ, ��������ֵ���ת, ���������ͨ�� 2 ��������������������������ת .
����1 .3 �������������
����Ŀǰ�������Ѿ��о��������ֳ����ķ���[ 4] , ������������Ŀǰ��ֻ�����, ��û��ʵ��.����Ƶĸ�ѹ�����·�������������ڶ�Ѳ����������ƵĻ��������ӳ���װ��, �ȿ���Ѳ��Ҳ���Գ���, �ṹ�Ƚϼ�, ����Ч�ʱȽϸ�.����Ƶij���������Ϊ��������, ��ϳ��������Ш�ο鲿�� .������ϳ�� 1 �Ӹ������м�ϳ��һ���ѷ�, �������������ֱ���ѿ�, ����Ш�ο� 4 �ٶԸ������м�ѹ, ������ᱻ��ѹ��, ���ߵij�������� .��ͼ 8 ��ʾ.
���������˿�Խ������Ե�ӵ��ϰ���ʱһֻ�ֱ�����, ��һֻ�ֱ�Խ����Ե��, ����ʱ�ϰ�����һ�ർ���ϵĸ���δ���, ���Ӻ�ϳ������һ��ƽ������, �����ͻ�����������ڵ�������ŵ����.������������Ŀ���, ����˵� 2 �׳������� .����ʾ��ͼ��ͼ 9 ��ʾ, ���� 2 ��ϳ��, ����ϳ�������ߺ͵��������ߴ�ֱ, �����ϰ���ʱ������ij���װ������, ϳ���������ϳ����ת������������ĸ���, �����Ш�ο��ڻ�����ǰ���ߵ����������¿�������ϳ��δ����ĸ���.�������������������ϰ���ʱ, ���Ȼ������ߵ��ͣ��, Ȼ�����������ݸ��˶��ĵ��, ʹ�缫��ת, ���ݸ�ת���´�������ĸ������Ш�ο��Լ�ǰ���ϳ��һ����ǰ�ƽ�, ֱ����ͨ�������в��ҽ���ǰ��ĸ�������, ֱ����һֻ�ֱ�Խ�Ϻ����ӿ����䵽��������Ϊֹ .������öθ�����, �ݸ˵����ת����ǰ����װ���ջ�, Ȼ���ٽ�����������Խ�϶���.
����2 ��ѹ�����·���������˵��˶�����
�����˻����˲���˫�۽ṹ, ��������������������ʱ���ȶ���, ������˫�۵�����¿��������Ӧ����̬��������ɸ����ϰ��Ŀ�Խ�ͳ���[ 5] .�����˵������������άͼ��ͼ 10 ��ʾ, ���ڴ˻����˵����������ǵ��������, ����������˶����̽��Ե��Ϊ��·������������˶�����������
����Ϊ��ʹ�˶����̷���������, ���潫���û����˵Ľṹ��ͼ������, �����˵Ľṹ��ͼ��ͼ 11 ��ʾ.���������������Գ�, �������ͼֻ��һ�������˶���ʽ�ı�ע .
��������Ҫ��ɻ����������˶� ����Ӧ���ϰ���Խ�ͳ���, ��ô�����˽�Ҫ�����»������˶���ʽ�����������ɻ����������˶�����Ӧ���ϰ���Խ�ͳ���. ( 1) �����˶� .˫������ 8 �� 9 ǰ��������, ���������������, ����ɳ��������� .( 2) ��ת�˶� .����������ͳ���������������ת�������� 3 �� 14 ���Եij�������ת�����.�ڴ˻�������, ֻ��Ҫ��ת 180° ���� .( 3) �����˶�.�����˵������������� 4 �� 13 �и��Ե��ݸ˺���ĸ������˶������ .( 4) �н��˶�.�н��˶�����Ҫ��������������, �����ѽ��ܹ��� 4 �� 13 �����������������˶�ʱ������н��мн����ɿ������ .( 5) �����˶� .�������������õ���ͼ 9 �ij�������ʱ, ϳ��������������˶���Ҫ���� 7 �� 10 ���ݸ�����ĸ������˶������ .
����������������ϴ��ڶ����ϰ���, ��ֻ������һ�ֵ��͵��ϰ����������Խ��ʾ, ���岽������.
������ 1 ��:��ǰ�۽ӽ�����ʱ, ��� 1, 2 ֹͣ, ������ 8 �� 9 ֹͣǰ��, ��� 5 �� 6 ��, ǰ��۵������ݸ�˳ʱ����ת, ���������������������һ������, �н��� 5 ˳ʱ����ת�ͼн��� 12 ��ʱ����ת, �����н��мн������ʱ, ��� 5 �� 6 �ر�.���õ� 2 �׳�������, �����������������, ͨ����������������صĹ�����, ������������ϵ�һ�α���ȥ, �Ա�ǰ�۵������� 8 ���� .��ͼ 12 ��ʾ.
������ 2 ��:ǰ�۵ĵ�� 5 ��, ǰ�۵������ݸ�˳ʱ����ת, ���ں�۵ļн��� 12 �ѽ�����н�, ǰ���й̶��������е���ĸ�����˶�, ��ĸ��������ͳ��������������������˶�, ��ʱ�н��� 5 ˳ʱ����ת, ���н��мн������ʱ, ��ʱ����� 5 �ر� .��ǰ����ת������С����������� 7, С���ִ����������ת, ���������ʱ����ת 180°��, �رյ�� 7 .�������������ݸ˵�������� 9, ���ں�۵ļн��� 12 ������н�, ��ǰ�۱��������ݸ˺���ĸ������ƶ���ǰ��, ���ƶ������IJ�Զ��, �رյ�� 9 .��ͼ 13 ��ʾ.
������ 3 �� :��ǰ����ת����С����������� 7, С���ִ����������ת, �������˳ʱ����ת 180° ��, �رյ�� 7 .ǰ�۵ĵ�� 5 ��, ǰ�۵������ݸ���ʱ����ת, ������ͳ��������½�, ���н��� 5 ������н�ʱ, �رյ�� 5, ��ʱǰ�۱�Ծ������. ��ͼ 14 ��ʾ.
������ 4 ��:�����ͬǰ�۹�����һ����Խ, �����˱�ָ�����Խ����ǰ����� .��ͼ 15 ��ʾ.
����3 �� ��
������������Ϊ��ѹ�����·���������˻�е���ֵ����, �û�����Ϊ�ڸ�ѹ�����Զ����ܻ�����ҵ�ṩ��һ�����õ�ƽ̨, ͬʱ�û�������δ������ڿ��Խ�ǰ��ij���װ��ж������ΪѲ��װ��, �����ͱ����Ѳ������, �ﵽһ�����õ�Ŀ�� .�û����˲������ֱ���ʽ���߽ṹ, ʹ�ṹ�ϸ�Ϊ���, �����ϸ�����ʵ��, �������װ�úͷ³��Խ�����ߵķ�ʽʹ�øû����˵ĵĿɿ��Ը���.ͨ������ʵ�����, �û����˿�������·���ȶ��ij���, ͬʱ��ȫ�����ֱ�߶ε�����Խ������, ��·������Խ�ϻ���Ҫ�˹�����, �������ܹ��Ϻõ���ɹ涨�ij�������.——�������ߣ� �� �� �� �� �ߺ��� �� �� �� �D
��������� :
����[ 1] ���˳�, ������, ̷ ��.�ܿյ�����·Ѳ�����˵��о�����[ J] .������, 2004, 26( 5) :467-473 .
����[ 2] ���, ������, ����Ԫ, ��.��ѹ�������˵���ʽԽ�ϻ���������[ J] .�����˼���, 2006( 11) :35-36.
����[ 3] ������, �����, ������, ��.һ������Խ��Ѳ����������гֻ���[ J] .��е���, 2006, 23( 8) :11-13 .
����[ 4] Է����, ������, �� ��, ��.�����·���߸����Ĺ������о���״[ J] .�ߵ�ѹ����, 2004, 30( 1) :6-9.
����[ 5] �� ��, ������.Ѳ�����˵����з������[ J] .�����˼�����Ӧ��, 2002( 4) :19-21.