����ʱ�䣺�������ࣺ�Ƽ����������1��
ժ Ҫ�� ժҪ: �����һ�������·���������˵Ļ�е�ṹ, �����˸û�������ҵ�ռ�����. �ڼ��������, ����Monte Carlo�����õ��˻����˲����۵Ĺ����ռ�. ���ø÷����ɱ���Ի������˶����̵���������, ����ؼ��˼������. ������ָ����ͳ�Ļ����˹����ռ�߽���ȡ������
����ժҪ: �����һ�������·���������˵Ļ�е�ṹ, �����˸û�������ҵ�ռ�����. �ڼ��������, ����Monte Carlo�����õ��˻����˲����۵Ĺ����ռ�. ���ø÷����ɱ���Ի������˶����̵���������, ����ؼ��˼������. ������ָ����ͳ�Ļ����˹����ռ�߽���ȡ������������, �Ҵ��������ϵ�ȱ��; �����һ���µĻ��ھֲ������ֲ��ı߽����ȡ����, ���и�������������, �÷����������ȸ�, ���ҷdz��ʺ��ڴ��������˹����ռ�߽�����.
�����ؼ���: �����; ����������; �����ռ�; ���ؿ�����
����1 ����(Introduction)
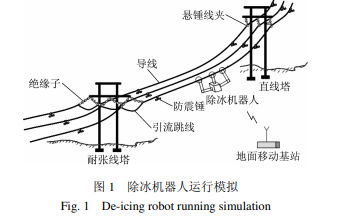
�����ʹ�ͳ�ij����������, ���û����˳������й���С���ɱ��͡�Ч�ʸߡ���Ա������������ͣ��Ϳ�������ҵ���ŵ�. ��Ϊһ�ֿ�����˹���ҵ�������·���߳�������, �䷢չǰ���dz��㷺[1∼3] . ͼ1��ʾΪ�����������ֳ�����ģ��ͼ, Ϊ��˳������������ߺ������·����, ��������Ҫ��Խ�����·�ϳ��ֵĸ��ָ����ϰ���.
���������˵Ĺ����ռ䶨��Ϊĩ��ִ�����ڽṹ�������������ܴﵽ������λ�õļ���, ���Ǻ�������������Խ��������һ����Ҫָ��. Ϊ�˱��ڷ���, ������Ҫȷ�������˵Ĺ����ռ䷶Χ. Ŀǰ��Ϊ���õķ����ǽ���������ֵ������. �������ǻ���Jacobian��������˶�ѧ�����ȷ�������˹����ռ�ķ���. ���ڼ���ĸ�����, �÷���ֻ�ܴ���ijЩ�ض��ṹ�Ļ����˹����ռ�����[4,5] . ���֮��, ������ֵ��������Ϊ�����, ������ߴ����Ե�������[6,7]����Ļ���������ʵ����ؿ����㷽��. ���ڸ÷�������Ի������˶����̽����������, ��˷dz��ʺ��ڷ��������˹����ռ�����. ����, �������ؿ�����ֻ�ܵõ������˹����ռ�Ľ���ͼ������. Ϊ�˱��ڼ���ͷ��������ռ��С, ����[8]����դ����ȡ�˻����˹����ռ�߽��, ��������С������ϵķ�������˹����ռ�߽����ߵĽ�������ʽ. ����, ����[8]����ı߽����ȡ������������, ���ø÷�����ȡ�ı߽��ֻ��ʵ�ʱ߽���һ�ֽ��Ʊ�ʾ. ����[9]���÷ֶ���ֵ�ķ�����Ȼ�ܹ�ȷ����ȡ���߽��, �������㷨����������, ��ȷ�����б߽���λ�÷ֲ�. ����, ͨ�����ĵķ�����֪, ��ʹ�ɹ���ȡ�������еĹ����ռ�߽��, �����������ַ������������˹����ռ������Դ���ȱ��Ͳ���.���Ľ��������ؿ���������Ƶ�һ������ʽ������������ҵ�ռ�������з���, ͬʱ�Ի����˹����ռ�߽�����ȡ���������ϸ������.
����2 ���������˱���������(Structure design of de-icing robot)
�������ڳ�����ҵ�Ļ����dz�����, �Ի����˱�������ɿ��Ժ����е��ȶ���Ҫ��ܸ�. �������ۺϿ����˹��������н�Ϊ�����Ѳ�����˷����Ļ�����[1∼3] , �����һ������ʽ���������˽ṹ, ��ͼ2��ʾ, �����˱��岿����3�����ɻ�е�ۺ��м��������: ǰ����۽ṹ��ͬ, �ֱ��ɴ�С�ۺ�ĩ�˼г������, ������������Ӵ�Ϊ��ؽ�, ����Խ����Ҫ��ʵ�����Һ��������ת��; С��Ϊ�����ֱ�, �䳤�ȿɵ�, ��ۺ�С�����Ӵ�Ϊ��ؽ�, ������Ҫ������ת��; �м��ֱ�Ϊ������. ���ֱ�ĩ��Ϊ���ϼгֻ���, ͬʱ�߱��������гֺͳ����ȹ���, ���ڲ��ṹ��ͼ3��ʾ. �гֻ�����Ƴɿ����ҿ��ϵĽṹ, ����ߴӼг����м䴩��, ��ǰ��ˮƽ����װ�й��߹���, �Ա��ڻ����˹�������, ͬʱ�ɽ��ͼг����Ե��ߵ�ĥ��. ˮƽ������г�������, �ڱպ�ʱ����Ш���ι���������,����ˤ������. �г����ڲ������4����ֱ�Ĺ�Ͳ����. ��˵�һ��Ϊ������Ͳ, �����ѡ�þ���һ�����ԡ�Ħ��ϵ�������ĥ�����Ƴ�, ͨ����ѹ����, ��ʵ���ƶ������ߵȹ���. ǰ�˵�һ��Ϊ������Ͳ, ����������ͻ�ݽṹ, ��ʵ����ѹʽ�����Ĺ���, Ϊ��ֹ����ʱ���˵���, ������Ͳ�ⲿ����Դ��ڵ����⾶. �����Ͳ�м�װ��ɨ��ˢ, ����ɨ�������ϵIJ������. ����, �ڼг���ǰ��װ�г�����, ͨ��һ�������ֻ����������ɴ������������������û�����, ��һ���̶��ϰѸ�����������, ������������ij���Ч��. �г������ֱ۵����Ӵ�Ϊ��ؽ�, ���ڻ����˼гֻ�������̬����. �м��������ڰ��ŵ�Դ��Ϳ�����.
���������˲�������ץ�ߵ��˶���ʽ. Ϊ�˱�֤���е��ȶ���, ��Խ��ʱӦȷ��ʼ���������ֱ���������·��. Ϊ��, ������������ֱ���������Խ�ϵķ�ʽ, ����, �м��ֱ���Ҫ���ȶ����ĵ�����, ǰ�����ֱ�ΪԽ�ϱ�, ��ĩ�˼г������ܵ��������λ�õļ��ϼ������˻����˵Ĺ����ռ�. Ϊ�˱��ڷ���, �Լ�ؽ�Ϊԭ��, �����˱���������������ֱƽ��ΪX-Z��, ������ͼ4��ʾ�ռ�ο�����ϵ.
��������ͼ4��ʾ�ռ�����˻���, ����D-H������[10]����ڲο�����ϵ���ùؽڱ���θ��ʾ�Ĺ�����P��λ������:����ʵ�ʽṹ������, �ؽڱ���θ1, θ2����һ����Χ�ڱ仯��; ����, Ϊ���������������ҵʱ�������·�Ͻ������, ����ƹ�����ͨ���Թؽڹ������Χ����������ȷ��һ���İ�ȫ��ҵ�ռ�.
����3 ���� Monte Carlo ������ �����ռ���� (Solving the workspace based on Monte Carlo method) Monte Carlo
����������һ�ֽ�������������������ѧ�������ֵ����. ����ͼ4��ģ��, �ڱ��������仯��Χ��, ͨ�������ȡ��һ�����ֵ {(θ1)i , (θ2)i ,(a2)i}, ����ȷ��һ�������ռ�λ������ֵPi , ����ȡ����������N�㹻��ʱ, �ɵ㼯��{Pi}(i = 1, 2, · · · , N)���ɽ��Ƶ����������˵Ĺ����ռ�, ������ȡ���������ĿԽ��, �õ��Ĺ����ռ��Խ��ȷ, ��״ҲԽ����. ������ⲽ��Ϊ:
����Step 1 ������˵��˶�ѧ����, ȷ��������ĩ��ִ�����ڲο�����ϵ�е�λ�÷���, �籾��ʽ(1) ��ʾ;
����Step 2 �ڹؽڱ����ı仯��Χ��, ��������N �����ȷֲ������ֵ, �Ӷ��ɵõ�N�����ֵ�����;
����Step 3 ��������ɵ�N�����ֵ��������õ�λ�÷���, �õ�N��ĩ��ִ����������ֵ, �����Ӧ������ֵ�ֱ����ָ���ľ�����;
�������֪ʶ�Ƽ���������������ͨ�ڿ��Ƽ�
����Step 4 ������õ�λ�õ���ʾ����, ���γ��˻������ֱ۹����ռ�㼯��“��ͼ”. ͼ5��ͼ6�ֱ�Ϊ���IJ���Monte Carlo������õij���������ǰ����X-Zƽ��Ϳռ�ƽ���ڵĹ����ռ�ͼ��(N = 6000).
����4 �����ռ�߽����ȡ(Extracting boundary of workspace)
��������Monte Carlo����ֻ�ܵõ������˹����ռ�Ľ���ͼ������. Ϊ�˱��ڼ���ͷ��������ռ�Ĵ�С, ȷ����ȡ�������ռ�ı߽���Ƿdz��ؼ��IJ���, Ŀǰ��Ϊ���õķ�����դ�ͼ�ֵ��[8,9] .
����4.1 դ��(Grid method)
������ͼ7��ʾ, դ����Ҫ˼����: �������ռ仮��ΪN����ɢ������������, ��ÿ����Ԫ��0��1; �����Ԫ�����й�����, ��Ԫֵ��1, ����0. ͨ�������߽絥Ԫ���ص�, �ɵ������б�����: �����Ŀ�굥Ԫ���ڵ�8����Ԫ������1��Ϊ0, ͬʱĿ�굥ԪΪ1ʱ, �õ�ԪΪ�߽絥Ԫ, ��ʱ�����õ�Ԫ�ڵ㼯��ƽ��������Ƶı�ʾ�߽絥Ԫ������.
������Ȼ, ����դ����ȡ���ı߽��ֻ��ʵ�ʱ߽���һ�ֽ��Ʊ�ʾ. ͼ8��ʾΪ��ȡ�ı߽����ʵ�ʹ����ռ��п��ܵ�3��λ�÷ֲ�(��Ӱ����Ϊʵ�ʹ����ռ�).
����4.2 ��ֵ��(Extremum method)
������ͼ9��ʾ, �������ռ䰴�л���, �߶�AB, CD ֮������Ϊһ��, ����Ϊ∆L. �ҳ���������Z���귽���ϵļ���ֵ��a�ͼ�Сֵ��d, �����㼴Ϊ��������ϡ���������߽��. �������������ڱ߽�, ͨ��������ֵ�ķ��������ҵ��ڱ߽��, ��ʱ�ɲ��õķ�����: ���������ڵ�Z���귽�Ӵ�С˳������, Ȼ������ж��������ڵ���Z����IJ�ֵ�Ƿ����Ԥ���趨��һ���б�ֵ. ������ڴ��ڸ��б�ֵ������, ��˵���������ڴ����ڱ߽�, ���Ҹ��������㼴Ϊ�ڱ߽��(��ͼ9��ʾb, c����).
������Ȼ, ���÷ֶ���ֵ�ķ���ֻ����ȡ���ֱ߽��. ��������������(��С∆L), ��ȡ���ı߽�㼯��Խ�ӽ�ʵ�ʱ߽�. ����, ��ʹ�ɹ�����ȡ�������б߽��, ��Ȼ����ȷ����ϳ������˹����ռ�, ����Ҫ��������������ı߽�㲻������ȫ���ʵ�ʱ߽���ɵ�. ����ͬһ����ɢ�߽��, �����ϳɵ�������ʽ�����Dz�ȷ����. ��������:
����ͼ10��ʾΪ��ȡ��һ�ι����ռ�, ��a, b, c, d�� e�Ǹ��������������ڵı߽��. ���������˹����ռ����ʵ�߽�������״�п�������ͼ11��ʾ��������֮һ: 1) ��ʵ�߽�δ����b, d����; 2) ��ʵ�߽����b, d����.
����һ����˵, ������ĩ��ִ�����Ĺ����켣��С��Χ��Ӧ�ǹ⻬��, �Ƚ�ͼ11�������, ��ͼ����ʵ�ķ�Ӧ�˻�����ʵ�ʵĹ����ռ���̬, ��������ı߽��b, d��δ���ʵ�ʱ߽�. ���, ����ȡ�ͷ��������˹����ռ�߽�����ʱ, ����������b, d���͵ı߽������ܵ����ڲ���������, ��Ȼ, ���ô�ͳ�ı߽����ȡ�����������������.
������2Ϊ����դ�ͼ�ֵ���ļ�����. ���������������ʱ, ����դ�ͼ�ֵ������ȡ����Ҫ���Ե��ڱ����㷨����ȡ����; �����������Ŀ������, ���ַ�������ȡ������������, ��������˵, ���߾���Ҫ���ڱ��ĵ���ȡ����. ����, ����ͼ8��ʾդ����ȡ���ı߽��λ�÷ֲ��ص�, ���ڱ�����Բ�α߽�Ĺ����ռ�, ����դ����õ��Ŀռ����Ӧ��С������ֵ, ��2�м����������۷����Ľ����һ�µ�.
����ͼ13Ϊ���ñ��ķ�����ȡ����ͼ5��ʾ�����ռ�ı߽�, ����������Nȡ10�����, �ɼ�, ���ñ��ķ�����ȡ���ı߽���нϺõ���϶Ⱥ�˳��.
����6 ����(Conclusions)
����1) �����һ������ʽ���������˽ṹ, �о��˸û�������ҵ�ռ�����. �ڼ��������, ����Monte Carlo������������˵Ĺ����ռ�, ������ֱ�ӶԻ������˶�ѧ���̵���������, ���˼���.
����2) ���ԭ�б߽����ȡ�����IJ���, �����һ�ֻ�����������ֲ��ı߽����ȡ����, ��ԭ�еķ������, ���ĵķ����������ȸ�, ���ҿ��ԽϺõĴ��������˹����ռ�����е�“��ٱ߽��”.
����3) ��Ŀ���Ϊԭ�㽨���ռ�����ϵ, ���������Ϊ������. ������������ֲ��ı߽����ȡ�������ƹ㵽3ά�ռ�߽����ж�. ——�������ߣ�ӡ ��, ��ҫ��, ���ɽ
���������(References):
����[1] ���, ������, ̷��. Լ�������µ�Ѳ���������˶�ѧ���[J]. ����������Ӧ��, 2006, 23(1): 44 – 48. (LI En, LIANG Zize, TAN Min. Analysis of solution to the inverse kinematics of inspection robot for power transmission lines with constraints[J]. Control Theory & Applications, 2006, 23(1): 44 – 48.)
����[2] POULIOT N, MONTAMBAULT S. Geometric design of the Linescout, a teleoperated robot for power line inspection and maintenance[C] //2008 IEEE International Conference on Robotics & Automation. Pasadena: IEEE, 2008: 3970 – 3977.
����[3] �ܷ���, ���ݱ�, �Ⱞ��, ��. ��ѹѲ�����˵������ʵ��[J]. ��е��ѧ�뼼��, 2006, 25(5): 624 – 626. (ZHOU Fengyu, LI Yibin, WU Aiguo, et al. Design and implementtation of inspection robots for high voltage power transmission lines[J]. Mechanical Science and Technology, 2006, 25(5): 624 – 626.)
����[4] WANG Y F, CHIRIKJIAN G S. A diffusion-based algorithm for workspace generation of highly articulated manipulators[C] //Proceedings of IEEE International Conference on Robotics & Automation. Washington: IEEE, 2002: 1525 – 1530.
����[5] CHEN X, GUPTA K C. Geometric modeling and visualization of manipulator workplace[J]. ASME Computers in Engineering, 1991, 1(5): 469 – 474.
����[6] RASTEGAR J, PEREL D. Generation of manipulator workspace boundary geometry using the Monte Carlo method and interactive computer graphics[J]. ASME Journal of Mechanical Design, 1990, 112(3): 452 – 454.
����[7] RASTEGAR J, FARDANESH B. Manipulator workspace analysis using the Monte Carlo method[J]. Mechanism and Machine Theory, 1990, 25(2): 233 – 239.
����[8] ALCIATORE D, NG C. Determining manipulator workspaceboundaries using the Monte Carlo method and least squares segmentation[C] //23rd ASME Mechanisms Conference. Minneapolis: ASME Press, 1994: 141 – 146.
����[9] ����, �����, ���t, ��. 3ά�����˹����ռ估����������[J]. ��е��ѧ�뼼��, 2006, 25(12): 1459 – 1502. (CAO Yi, LI Xiujuan, NING Yi, et al. Computation and geometrical error analysis of a 3D robot’s workspace[J]. Mechanical Science and Technology, 2006, 25(12): 1459 – 1502.)
����[10] ������. �����˼�������[M]. �人: ���пƼ���ѧ������, 2008.