发布时间:所属分类:科技论文浏览:1次
摘 要: 摘要: 目前除冰任务都局限在一些危险区域,路况复杂,机器人采集信息零乱,容易产生干扰; 针对这一问题,设计引入无迹粒子滤波器信息融合思想到除冰机器人的设计中,研究现有的除冰机器人的缺陷,优化设计了一种除冰机器人的本体结构,优化了各种非接触式传感器的布局
摘要: 目前除冰任务都局限在一些危险区域,路况复杂,机器人采集信息零乱,容易产生干扰; 针对这一问题,设计引入无迹粒子滤波器信息融合思想到除冰机器人的设计中,研究现有的除冰机器人的缺陷,优化设计了一种除冰机器人的本体结构,优化了各种非接触式传感器的布局结构,为避障提供充足的数据来源; 设计了无迹滤波的信息融合技术,解决了在外部复杂环境中某传感器信息存在的信息干扰; 以上海某智能信息公司的除冰机器人进行实际的测试,实验包括除冰机器人、YJV22 - 3* 300 电缆,其弯曲直径为2. 5 m、使用石膏模拟的覆冰、秒表等,对实验中传感器采集的数据经过数据预处理后使用 Matlab 7. 0 对其进行准确率仿真,仿真结果表明,这种除冰机器人的避障准确率高达 96. 3% ,在传感器损坏后,模型恢复的延时不超过 3 s,结构优化明显。
关键词: 除冰机器人; 信息融合; 无迹粒子滤波
0 引言
输电线路覆冰是电网受到自然灾害的常见形式,这种灾害可以引起跳闸、倒杆、大面积停电等冰灾事故,给电网的安全运行与人们的日常生活带来了危害。近些年,我国的输电线路受到的冰雪灾害尤其较多。在保障电力输电线路安全稳定运行的过程中还不能大量使用专门的除冰装置,智能使用人工除冰的方式在冰雪环境下除冰,这样的方式效率低下,同时对电力工人的生命安全带来了威胁。智能型的输电线路除冰机器人是在无人控制的情况下在行进过程中智能地避开前方的障碍区,这些障碍物包括绝缘子、防震锤等各种电力器件,顺利前进的过程完成除冰作业。近些年,我国在除冰机器人的研究领域展开了大量的研究,各大研究所与高校投入了巨大的精力进行除冰机器人的研制,也出现了很多优秀的研究成果[1 - 3]。
1 无迹粒子滤波的信息融合算法介绍
本文使用了无迹粒子滤波的信息融合技术对除冰机器人[4 - 6]进行优化,这种信息融合技术可以从根本上绕开系统线性化的问题,假设除冰机器人的信息融合时涉及的干扰为
信息在不断的采集过程中,经过无迹粒子更新滤波器将产生避障信息,控制器通过避障信息对电机与除冰器进行驱动,不断向前运动完成除冰工作。
2 除冰机器人总体设计
2. 1 机器人的机械结构设计
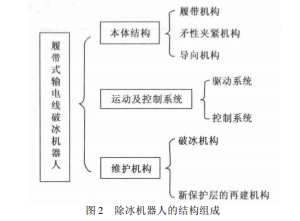
移动除冰机器人的总体设计包括本体结构、运动控制系统及去冰机构等 3 个部分。本体机构是除冰机器人的主体结构部分,包括机器人前进的履带结构、与输电线的柔性夹紧机构及爬行的导向机构。本文在除冰机器人的行进中使用了橡胶式的履带结构,保证行进中与输电线有较大的接触面积与摩擦,柔性的橡胶可以保证输电线的表面不易受到损坏,夹紧机构使履带机器人对输电线的直径有很好的适应性。控制系统可以实现是除冰机器人的前进与暂停发送指令,实现输电线的破冰。爬行导向机构能够实现破冰功能,还可以实现对线缆的维护,具体的机器人的功能划分为:
2. 2 机器人履带部位的硬件优化设计
除冰机器人在行进中破冰,其爬行速度要可调。爬行的速度要根据覆冰的厚度进行调整,本文中机器人的本体设计时的性能初步要求如下: 爬行速度 v < 5m/min ,最大爬行坡度 θ > 60o ,破冰刀转速 t = 300 r/min ,机器人重量 m < 25 kg。本文设计的行进机器人中使用输电线穿过上下侧的履带,设计了上下两体的结构对输电线路绕度的变化做出适应,如图 3 所示,上下两体使用弹性机构进行连接,履带结构包括支架、上下的履带、履带的驱动电机等设备,通过底板使用夹紧机构夹紧在上下的输电线上,导向机构设置的底板的前部与后部。本文的除冰机器人包括第一履带结构与第二履带结构两个部分,主体包括橡胶履带、驱动轮与传动轴转动,传动轴与驱动轮固定连接,履带在驱动下工作,两个压紧轮可以保证履带与输电线之间更加紧扣,增加了机器人的爬行能力。保证除冰机器人在履带中安全稳定行走少了柔性夹紧机构,输电线从机器人的中间部位穿过后,上下侧的第一、第二履带夹紧了输电线,实现爬行,这种结构的引入可以适应不同直径的输电线,保证在输电线上爬行稳定:
2. 3 避障模块设计
因为在输电线路被覆冰后重量大大增加,为了防止杆塔不被压断,除冰机器人的设计应该尽量保证轻便,便于携带,除冰机器人还必须具有很强的智能避障能力。除冰机器人的工作环境线路为引流线路,一些相连物比如防震锤、绝缘子串、悬垂线位移动路径的障碍物,除冰机器人的工作环境可以总结为强电磁场、半结构化。强电磁场是指机器人运行的环境线路是处在一种带电运行的线路中,半结构化的环境是指输电线路的全局宏观结构模型是事先可以计算得到的,但是局部的障碍物分布与类型是未知的,这些局部环境包括障碍物的位置、机器人的当前位置等。
3 除冰机器人的外部传感信息的采集
传感器技术的不断发展与更新使得除冰机器人在数据来源有更多的选择,也满足了更为严格的要求,智能除冰机器人可以使用更高性能与高度集成的传感器进行更为精确地定位与控制,选择先进的传感器对周围的环境数据进行采集时机器人避障的重要部件,机器人要求传感器具有更高精度、重复性好、稳定性高的特点,对一些恶劣的环境要具有良好的适应能力。传感器的灵敏度、线性范围、精度要有适度,因为较高的准确性与灵敏度会影响系统的工作精度,但是如果不能保证精确性也不能实现准确避障的要求,经过以上的分析,本文选取了激光传感器、红外传感器、超声波传感器等非接触式的传感器构建障碍物的检测系统。非接触式的传感器是通过像磁场、光波、红外线等中间传递介质进行检测。
4 干扰信息的拟合排除过程
根据第一部分的内容,系统通过无迹粒子滤波的信息融合算法对机器人的行进控制和干扰消除,驱动控制器同时控制着破冰机构刀具的驱动电机。除冰机器人根据传感器采集数据,数据采集后经过信息拟合产生避障源数据,这些数据包括此时机器人本体距离障碍物的各种信息,配合激光、红外、超生传感器信息,根据除冰机器人的干扰消除流程图如图 5 所示。
相关知识推荐:机器人专业论文投稿SCI期刊好发吗
在除冰机器人的行走中要跨越防震锤、绝缘子、耐张线夹等支撑附件,这些设备就成为除冰机器人在路线行走的障碍区,为跨域这些障碍物,实现长距离智能避障的行走必须能够基于本身安装的各种传感器的数据来识别障碍物的信息,完成避障策略的制定与避障动作,本文将红外、激光及超声等非接触性传感器采集周围的环境数据,经过多传感器数据融合后进行避障计算,传感器被安装在除冰机器人的前后左右 4 面,信息融合成为除冰机器人顺利前行的重要基础。
5 系统实验分析
为了更好地验证本文的信息融合方法在除冰移动机器人中的优越性,实验中,以上海某智能计算公司的机器人产品为例,搭建了破冰性能仿真平台,测试的性能包括避障准确率,破冰速度等关键指标,实验包括除冰机器人、YJV22 - 3* 300 电缆,其弯曲直径为 2. 5 m、使用石膏模拟的覆冰、秒表等,对实验中传感器采集的数据经过数据预处理后使用 Matlab 7. 0 对其进行准确率仿真。实验中分别将电缆设置为不同的弧度计算其爬行速度与破冰速度,分别将一些传感器在不同阶段关闭,计算其数据融合的准确度,使用无迹粒子滤波器信息融合与标准的粒子信息融合的均方误差对比图如图 6 所示。
图 6 中表示的标准粒子滤波器滤波时的均方误差表,滤波器中包含 局 部 滤 波 器 1、局 部 滤 波 器 2 与标准加权融合滤波器。
由图 7 可见,经过无迹粒子滤波算法更新后的信息融合系统对信息的测量均方差较标准的粒子滤波算法更为准确,针对不同数目的传感器失效,系统在误差上表现了较为稳定的变化曲线,误差保持在 0. 02 附近,证明该方法具有很强的实用性。
6 结束语
本文针对除冰机器人中的传感器部分失效后无法提供实时准确的数据情况,设计引入无迹粒子滤波器信息融合思想到除冰机器人的设计中,第一,选择了红外、激光及超声 3 种非接触式传感器安装在除冰机器人的周围,根据除冰的特点设计了适合不同直径与弯度的除冰机器人,解决了机器人数据来源单一的问题; 第二,采用无迹粒子滤波技术对信息进行融合,解决了在非线性环境中某传感器信息都是后带来的信息干扰。在不同传感器失效的情况下对机器人的除冰性能进行了测试,这种除冰机器人的避障准确率高达 96. 3% ,在传感器损坏后,模型恢复的延时不超过 3 s,具有很强的实用性。——论文作者:蒋琳琼,周顺先
参考文献:
[1]孙翠莲,王洪光,王鲁单. 一种改进的超高压输电线路巡检机器人越障方法 [J]. 机器人 RoBOT. 2006,28 ( 4) : 379 - 35.
[2]李铁铮,居鹤华. 基于栅格空间的移动机器人快速路径规划方法[J]. 计算机测量与控制,2012,20 ( 1) : 164-167.
[3]吴功平,肖晓晖,郭应龙,等. 架空高压输电线自动爬行机器人的研制 [J]. 中国机械工程,2006,17 ( 3) : 237 - 240.
[4]左 岐,谢 植,孙德辉. 巡线机器人的发展与应用 [J]. 机器人技术与应用,2007,3: 37,42.
[5]周风余,吴爱国,李贻斌,等. 高压架空输电线路自动巡线机器人的研制 [J]. 电力系统自动化,2004,28 ( 23) : 59 - 91.
[6]李维赞,王吉岱,孙爱芹. 输电线路巡检机器人的设计与控制系统研究 [J]. 制造业自动化,2008,30 ( 11) : 79 - 82.