发布时间:所属分类:科技论文浏览:1次
摘 要: 摘要:由于干线绿波协调控制方案实施路段的物理与交通特性差异,在实际交通场景中不同干线协调控制效果难以量化比较。本文利用车辆轨迹数据,从绿波协调特性出发,提出了一种基于轨迹数据的城市干线绿波协调控制效果评价方法,以实现对不同绿波控制方案的评价。首先利
摘要:由于干线绿波协调控制方案实施路段的物理与交通特性差异,在实际交通场景中不同干线协调控制效果难以量化比较。本文利用车辆轨迹数据,从绿波协调特性出发,提出了一种基于轨迹数据的城市干线绿波协调控制效果评价方法,以实现对不同绿波控制方案的评价。首先利用轨迹数据进行方案评价所需的车辆 OD 矩阵数据统计;其次在考虑协调干线路段内未协调车辆数对干线绿波协调影响下,利用车辆实际与理想连续通过交叉口数构建干线绿波协调控制评价方法,并利用 VISSIM 进行了仿真验证。仿真实验结果表明:该评价方法能够对不同干线绿波协调控制方案进行准确评价,且在较低轨迹统计车辆渗透率下仍具备可行性,其有助于绿波协调控制算法的优化与实际应用。
关键词:交通控制;绿波评价;轨迹数据;协调指数
0 引 言
城市干线绿波协调控制作为一种缓解城市交通拥堵的干线协调控制方法,由于其部署简单和效果明显而被广泛用于城市交通控制中。城市干线绿波协调控制相关研究多集中于控制模型的优化,常玉林等[1]分析了绿带速、周期以及相位差等指标,提出了一种双向绿波信号的改进图解法; 黄慧琼等[2]通过分析交叉口间距与车辆排队消散时间,提出了一种干线绿波协调公共周期与相位差的优化方法; 于德新等[3]基于线性规划模型,提出了一种干线协调控制优化方法,实现了对MULTIBAND模型中绿波带形式优化; 荆彬彬等[4]从车队实际形式速度波动性出发,以双向绿波带宽之和最大以及速度波动百分百之和最大为一、二级目标,提出了一种绿波协调控制目标规划模型; 卢凯等[5]针对不同绿灯终点型绿波带设计,基于双向绿波设计数解算法,构建了一种双向绿波协调数解法; 李永强等[6]针对绿波控制开环控制问题,以最大绿波带宽为优化目标,提出了一种数据驱动交通响应绿波协调控制模型; Ma等[7]将自适应机制引入绿波控制,以绿波带宽最大和延误最小为目标,提出了一种基于自适应人工鱼群算法的绿波控制系统优化方法。上述算法研究重点侧重于算法优化,不同算法模型在迁移到实际干线协调路段时算法适应性可能存在一定差异。因此,对不同干线绿波协调控制效果评价研究有助于增强算法的鲁棒性,提升干线绿波控制方案实际应用效果。
目前,对于绿波协调控制效果的评价,卓曦等[8]从绿波系统效率与安全指标出发提出了一种绿波协调控制系统灰色关联评价方法;施俊庆等[9]利用仿真软件对双向绿波控制效果进行了评价;林清韩等[10]将绿波交通特有参数与传统指标相结合,同时考虑次干道通行效率,利用灰色关联分析法对绿波协调系统控制效果进行了评价;卢凯[11]通过计算行驶速度和绿波带宽之间的关系,利用集对分析法对不同绿波控制方案进行评价,但其评价结果受到阈值选取和绿波协调交叉口数量的限制;总体看来适用于不同绿波协调控制方案评价方法研究较为缺乏。此外,当前绿波协调控制效果评价指标获取较为复杂,指标计算过程中相关参数取值可能会影响实际场景下评价结果的准确性。
综上,国内外学者对绿波协调控制进行了一系列研究,但实际场景下适用于多种绿波协调控制方案评价方法研究相对较少。本文以车辆轨迹数据为基础统计了车辆行驶OD矩阵表,协同考虑车辆连续通过交叉口数与停车次数构建了干线绿波协调控制评价方法,在保证评价方法简便可操作的基础上实现了对不同绿波控制方案的评价。
1 绿波控制评价方法
本文所提出的绿波控制效果评价方法是基于车辆实际行驶轨迹,通过轨迹数据获取车辆行驶 OD 矩阵表。在此基础上,利用绿波协调特性(车辆连续通过交叉口)构建了评价方法,从而实现了不同绿波控制效果评价。
1.1 数据处理
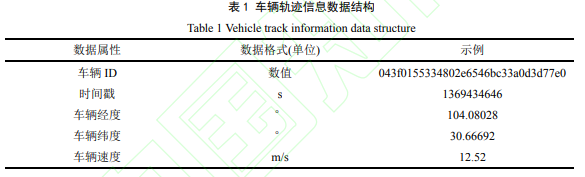
当下由于各种检测器以及终端设备的应用,使得车辆数据的获取变得更加轻松,丰富的数据使得对于交通控制的研究可以更加深入,但是由于检测器损坏以及数据传输过程中的数据丢失,原始数据往往需要对数据进行预处理以便获得有效数据。其中车辆轨迹原始数据信息主要包括:车辆 ID、时间戳、车辆经纬度、车辆速度。车辆轨迹信息数据结构如表 1 所示。
完成有效数据获取后将时间戳转换为标准时间从而便于数据处理与统计,还需要对数据中存在的重复数据以及缺失数据进行处理,以车辆 ID 作为检索基础,在目标时间段内对车辆重复信息进行清理,对于缺失数据通过同一车辆 ID 的数据进行关键数据的补全以及无关数据清除。在完成数据处理后可以通过对于车辆轨迹信息与实际地图信息的匹配并以车辆 ID 为基本单元生成车辆轨迹时空图(图 2),并以车辆的轨迹数据进行车辆 OD 数据统计。
1.2 车辆 OD 矩阵
OD 矩阵是描述交通网络中所有出行起点到出行终点之间在一定时间范围内交通流量的表格,反映了某个城市或区域的基本交通需求[12]。OD 矩阵在交通规划研究中占有极其重要的地位,能揭示出城市交通症结的原因、交通需求与土地利用、经济活动的规律[13]。本文中将干线绿波协调路段编号作为 OD 矩阵中的起点与终点。
完成原始数据处理后,将所测绿波协调控制路段位置信息与车辆轨迹数据进行匹配,获得每辆车的行驶轨迹以及速度,以便对绿波协调路段内车辆进行轨迹统计车辆 OD 数据,其中车辆 OD 表中的起点 O (origin)与终点 D(destination)皆位于车辆行驶的路段位置。定义在绿波协调控制路段内连续通过两个及以上交叉口的车辆为有效绿波协调车辆。定义绿波协调路段内车辆 OD 出行中出发点为车辆初始进入绿波协调交叉口前路段编号,目的地为车辆驶离干线绿波路段编号或由于延误而在干线绿波内开始排队路段编号,即在干线绿波协调控制中车辆一次出行可能存在多个 OD 出行。由于本文提出的评价方法对于双向绿波与单向绿波计算方法相同,现用单向绿波交通进行例证说明。绿波交通干线示意图如图 3 所示,其中 i C 表示干线绿波中第 i 个交叉口, i L 表示干线绿波中第 i 个路段。
根据车辆轨迹数据统计干线绿波车辆通行情况,并记录入车辆 OD 出行表,详细步骤如下: Step 1:检测进入干线绿波协调控制路段内车辆初始时间 0 t 位于路段位置信息起点 O ;
1.3 绿波评价指数设计
交通评价作为交通控制的基础,其从指标选取到权重确定再到目标函数确定具有整套的评判流程,城市干线绿波协调控制作为一种特殊的交通控制方法,在对比不同控制方案效果评价时,考虑干线绿波协调控制内交通状态造成车辆行驶速度与设计车速产生偏离,对于干线绿波协调控制效果的评价不能使用常规的交通评价方法,一般的交通评价方法是对于交通状态的评价,其评价结果的好坏与交通状态有着直接的关系,而对于绿波干线协调来说,其本质上应将干线协调前后状态提升程度作为评判依据,但如此进行评价不仅实际难以操作,而且不能进行不同干线绿波协调控制方案的评价。综上,本文从干线绿波协调控制实际效果出发,构建干线绿波协调控制效果评价方法。
干线绿波协调设计目的是使车辆在设计车速行驶下每个路口都遇到绿灯,从而保证干线绿波能够承载更多交通量。对于干线协调车辆而言,车辆连续通过交叉口数目将极大影响驾驶员对于干线绿波控制效果整体感受,本质上车辆连续通过交叉口车辆数目越多等价于车辆在干线绿波内行驶时间越短,但车辆一次出行可能存在不同连续通过交叉口数组合,其连续通过交叉总数可能一致,仅以实际车辆连续通过交叉口数目进行评价会影响评价结果的准确性。为了克服交通状态随机性对评价结果造成的波动,在实际车辆连续通过交叉口数目上引入了理想车辆连续通过交叉口数,车辆一次出行产生的不同 OD 出行,分别根据其理想车辆连续通过交叉口数计算实际绿波协调对于理想状态的近似程度,此外,由于实际绿波协调运行中未进入绿波干线协调车辆数量存在波动性,其数据大小会干扰绿波协调实际运行状况,故在干线绿波评价时需对其进行剔除。综上,本论文设计了绿波实际通行效率值、绿波理想通行效率值、绿波通行扰动值,进而综合计算绿波协调评价指数,最终对城市干线绿波协调控制进行评价。评价流程图如图 5 所示。
基于车辆 OD 矩阵统计数据表计算相关指标如下:
1)绿波实际通行效率值设计。对于进入干线绿波协调车辆计算绿波实际通行效率值 R I ,其指标大小表示车辆在绿波协调控制方案实际运行状态,其物理意义为从不同路段进入绿波协调控制路段的车辆数与其相应实际连续通过交叉口数乘积,对于单车而言 R I 代表干线绿波在实际状态下的车辆客观打分,打分值为单车实际连续通过交叉口数。
2)绿波理想通行效率值设计。对于进入绿波协调车辆,理想情况下车辆从进入绿波协调路段遇到的首个绿灯交叉口开始一直到驶离干线绿波路段内所经过的各个路口均为绿灯。结合车辆 OD 矩阵数据与理想连续通过交叉口数计算绿波理想通行效率值 I I ,其表示绿波控制效果的理想运行状态,实际含义为所有 OD 出行中各交叉口驶入车辆数与其在绿波协调干线内行驶时可连续通过交叉口数的乘积,对于单车而言 I I 代表干线绿波在理想状态的车辆客观打分,打分值为单车在绿波协调路段行驶内理想连续通过交叉口数。
3)绿波通行扰动值设计。对于未进入干线绿波协调的车辆,其数量对干线协调控制效果造成影响,在计算绿波理想通行效率值时,数据 i N 值将未进行绿波协调车辆纳入统计范围,同时当存在大量车辆未进行干线绿波协调控制等极端场景时要保证评价结果的稳定性,就必须将未进行协调车辆从其中剔除;此外,不同绿波协调方案在实际应用中,控制场景具有不可重复性。为消除上述因素对评价结果的影响,故定义了绿波通行扰动值,其实际意义为绿波协调控制路段内未进入绿波交通的车辆数与连续通过交叉口数,对于单车而言 D I 代表未进入绿波协调车辆客观打分,由于对象是未进入干线绿波协调车辆,其打分值均定义为 1。
4)绿波协调评价指数设计。对于绿波协调评价是基于实际通行效率值,在考虑干线绿波扰动值大小前提下,计算其相较于绿波理想通行状态的近似程度。
2 仿真验证
以文献[14]中干线绿波协调交叉口基本数据为基础,利用 VISSIM 构建干线绿波协调仿真实验,仿真路网如图 6 所示,干线长度为 0.94 km,其中包括 4 个 T 型交叉口,交叉口从下至上分别为交叉口 1 至交叉口 4,交叉卡间距分别为 234、281、166m,其各交叉口流量流向如表 3 所示,仿真持续时间为 1 h。
文献[14]中通过实际调研,拟定了 2 种绿波干线协调控制方案,其分别为将整个干线绿波协调划分为多个子区下的绿波协调控制方案与常规 4 个交叉口共周期的干线绿波协调控制方法。第 1 种信号控制方案中前两交叉口公共周期为 132 s,后两交叉口公共周期为 162 s; 第 2 种控制方案中公共周期均为 170 s。详细配时如表 4 所示。
利用 VISSIM 进行仿真建模,模拟实际干线绿波协调的运行状态,在保证安全性的同时可以方便对不同绿波协调控制方案的模拟,VISSIM 仿真软件具有丰富的评价功能,可以获取有效的交通评价参数,此外其提供了丰富的 COM 接口支持二次开发。
3 结果分析
VISSIM 仿真软件可以输出相关延误、停车次数等交通评价数据,其结果具有一定可信性,为使本文评价方法更加具有可信性,利用多次仿真获得路网的干线绿波协调车辆延误值作为本文提出的评价方法的参照进行一致性检验。以 5 min 为单位时长,在仿真时长内分别统计两个方案的车辆延误情况,结果如图 7 所示。
可以看出, 绿波控制方案 2 在大部分仿真时间控制效果优于方案 1,在仿真初始运行阶段由于仿真软件车辆仍未进入中心交叉口,干线绿波内车辆未达到预期交通量,此时边界交叉口信号控制方案对与整体绿波协调控制效果的评价起到了关键作用,此时仿真软件并不能真实反映控制方案的情况。总体上去除由于仿真软件造成的仿真数据偏差,两方案控制效果都随着路网交通状态的稳定而趋于平稳,同时干线绿波的车辆延误状况在一段时间增长态势后呈现稳定状态,方案 2 与方案 1 相比车辆延误降低了 18.15%,其控制效果体现明显优越性。
此外,同样以 5 min 为单位进行车辆 OD 矩阵表的统计并计算两方案的协调指数,结果如图 8 所示。控制方案 2 同样优于方案 1,其 VISSIM 仿真评价数据得出的结论具有一致性,值得注意的是,相较于 VISSIM 仿真评价结果在初始时产生了结果偏差,本文所提出的绿波协调控制效果评价方法在交通状态变化下表现出了一定的稳定性。
此外,对于实际干线绿波内车辆轨迹数据并不能完全获取问题,利用 MATLAB 联合 VISSIM 二次开发,通过在不同轨迹数据采集车辆渗透率 p 下的评价结果分析,尽可能去模拟实际绿波干线内车辆数据特征,进而对评价方法的鲁棒性进行验证。不同渗透率下绿波评级结果分析如图 9 所示,整体而言绿波协调信号控制方案 2 优于方案 1,其结果与上文采用延误作为评价结果具有一致性,同时随着轨迹数据采集车辆渗透率的降低,绿波协调信号控制方案 2 相较于方案 1 的优越性在逐步降低,当渗透率降低到 20%时,信号控制方案 2 的优越性难以被有效刻画,究其原因在于当渗透率降低当一定程度时,干线绿波内随机性被放大,对于绿波协调评价指数 E I 不稳定归结于实际绿波通行效率值 R I , R I 在低渗透率时会产生较大的波动性,故影响最后方案评价结果,但总体看来,在保证轨迹数据采集车辆一定渗透率下,该评价方法具备实际可行性。
4 结 论
本文提出了一种基于轨迹数据的干线绿波协调控制效果评价方法,从绿波协调实际运行状况出发,面对不同绿波协调控制车辆速度不确定性造成的评价困难,本文通过定义车辆 OD 矩阵来记录干线绿波协调车辆运行状况,同时结合绿波交通特性利用连续通过交叉口数为车辆进行打分,并以此为基础计算干线绿波实际运行状态相较于理想状态的近似程度,实现了不同干线绿波协调控制效果评价。仿真结果表明,本文所提出的评价方法可以实现对不同绿波控制方案的有效评价;且在一定渗透率下评价方法也具备可行性。但是,由于本文仿真模型限制,对于更多交通状态下干线绿波协调控制效果评价,以及在不同绿波协调交叉口数与交叉口类型下的绿波控制效果评价有待进一步研究。——论文作者:刘小明 1,魏向达1,董路熙 1,尚春琳 1
参考文献
[1]常玉林, 张其强, 张鹏. 城市干线双向绿波控制优化设计[J].重庆理工大学学报(自然科学),2014,28(12):108-112.
[2]黄慧琼, 欧方前. 干线绿波协调控制优化研究[J]. 广西科技大学学报, 2020, 31(3): 91-98.
[3]于德新, 田秀娟, 杨兆升, 等. 改进的干线协调信号控制优化模型[J]. 浙江大学学报(工学版), 2017,51(10): 2019-2029.
[4]荆彬彬, 鄢小文, 吴焕, 等.考虑行驶速度波动的进口单放绿波协调控制模型[J].交通运输系统工程与信息, 2017, 17(3): 83-90.
[5]卢凯, 徐建闽, 李轶舜. 进口单独放行方式下的干道双向绿波协调控制数解算法[J]. 中国公路学报,2010,23(3):95-101.
[6]李永强, 李康, 冯远静. 数据驱动交通响应绿波协调信号控制[J]. 控制理论与应用, 2016,33(5): 588-598.
[7] Ma C X , He R C. Green wave traffic control system optimization based on adaptive genetic-artificial fish swarm algorithm[J]. Neural Computing and Applications, 2019, 31: 2073-2083.
[8]卓曦, 施文荣, 钱振东. 城市干道绿波协调控制系统交通评价方法[J]. 福州大学学报(自然科学版), 2015, 43(3): 369-376.