发布时间:所属分类:科技论文浏览:1次
摘 要: 摘要:为满足新建射电望远镜在单站或多站联合进行的深空探测或射电天文观测,对中心坐标精确测定的要求,提出一种利用已知精确中心坐标的望远镜作为参照物,测量地平式射电望远镜中心点坐标的方法和测量数据处理方法。这一方法对场地和设备的要求较低,能够得到毫米级
摘要:为满足新建射电望远镜在单站或多站联合进行的深空探测或射电天文观测,对中心坐标精确测定的要求,提出一种利用已知精确中心坐标的望远镜作为参照物,测量地平式射电望远镜中心点坐标的方法和测量数据处理方法。这一方法对场地和设备的要求较低,能够得到毫米级或亚毫米级的位置精度。尤其适合对天线阵列的中心位置进行测量。对国家天文台密云观测站的 40 m 射电望远镜进行了中心坐标测量,位置精度 2.3 mm(Root Mean Square,RMS),满足了后续的观测工作对其位置的需求。
关键词:参照物;大地测量;甚长基线干涉测量;射电望远镜;光学测量
深空探测和射电天文观测,尤其是多天线的天线组阵和甚长基线干涉测量(Very Long Baseline Interferometry, VLBI)观测等工作,都需要确定射电望远镜中心的精确位置。对于地平式的望远镜,中心点通常是方位轴和俯仰轴的交点;因此,中心点往往不是一个实际存在的点,也没有与之对应的实体,对中心点的测量需要间接的测量和计算。目前,测量射电望远镜中心点的方法主要是 VLBI 测量法以及归心测量法 [1-2]。
VLBI 技术能够以较高精度进行天文观测,同时它也能精确地测定基线长度,即参与 VLBI 观测的基线两端观测设备参考点之间的距离,参考点即射电望远镜的中心点。给定一个观测站的精确位置,通过观测已知的河外射电源,就可以确定基线另一端待测站点的坐标[3]。
射电望远镜的中心点归心测量是一种大地测量的方法,一般利用一些已知精确坐标的基准站作为参考建立局域控制网,利用常规的光学测量方法(如全站仪)测得物体在控制网内的位置,再将其坐标转换到地心三维坐标系中。这种方法要求存在坐标已精确测得的基准站或者永久基桩,才能够顺利实施 [4]。在国内外已经有过多次此类工作,比如 1997 年 Effelsberg 的 100 m 射电望远镜的位置测定工作,采用三个固定地标对望远镜进行了观测[5];天马 65 m 射电望远镜等也有类似的工作[2,6]。另一种方法可以在望远镜正常观测的过程中进行中心点测量,被称为随机动态方法[7],降低测量工作对正常观测的影响,获取大量数据;类似地应用固连至大天线结构上的GPS设备的高精度监测 [8] ;也有利用两轴机器人和一对测量天线进行自动化测量的方法,以较低的现场人工工作量获得大量数据[9-10]。
上述的两种常见的测量方法均有其局限性。密云站新建的 40 m 射电望远镜尚不具备开展 VLBI 测量的条件,将在未来开展此类测量,并且这种方法也需要一个初始位置;而归心测量方法则需要就近的 GPS(Global Positioning System)基准站或其他参照物,但密云站内并无可用的参照物或基站。本文的工作采用已经过长期运行,并已获得精确坐标的密云站50米射电望远镜作为参照物,对同站点的 40 米射电望远镜的中心坐标进行测量和计算,得到其坐标,为之后 VLBI 的长期测量提供初值、比对和参考。
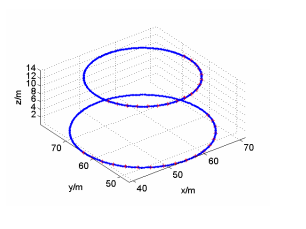
对于射电望远镜上与主反射面刚性连接的任何一个点来说,当望远镜沿着方位轴转动时,划过的轨迹为一圆环,其圆心在方位轴上,且所在平面与方位轴正交;当望远镜围绕俯仰轴转动时,划过的轨迹可组成一围绕俯仰轴的圆环。通过对圆环的测量可以确定方位轴和俯仰轴在空间中的位置,并实现望远镜中心点的计算[4,11-12]。
为得到密云站新建40 m射电望远镜的中心点坐标,利用 50 m 射电望远镜的中心点作为参照物进行测算。首先利用两台 GPS 接收机通过双差建立站内本地坐标系,然后在此控制网内利用全站仪分别测定两座望远镜的中心点在本地坐标系内的位置,最后依靠参照望远镜的精确坐标计算出待测望远镜中心点的位置坐标信息。使用参照物的望远镜中心测量方法能够简单易行地获得大型射电望远镜的中心坐标信息,对场地和仪器的要求较低,无须特别的准备工作并能在几天之内快速完成。在难以开展常规归心测量的条件下能够提供毫米级精度的天线中心位置坐标,可为后续的工作和高精度测量提供初始参考。
1 密云站 40 m 望远镜中心点坐标测量
1.1 场地设置和测量设备的搭建
在密云观测站的 50 m 射电望远镜(以下简称为 A 镜)和新建的 40 m 射电望远镜(以下简称为 B 镜)附近设置两个 GPS 测量点,七个全站仪位置;并在射电望远镜运动结构上粘贴合适的反光贴片,作为观测标志点。由于站内地形高低不均,并且树木、建筑较多,所以选择的观测位置都应保证能够直视观测目标,不被遮挡;GPS 接收设备和全站仪都放置在三脚架上,保证位置稳定。其站内观测位置俯视图如图 1 所示。
为了建立两座望远镜中心点位置之间的关系,需要在密云站内设置本地坐标系,在坐标系当中测量两座望远镜的标志点并计算其位置。由于两座望远镜距离较远(相距 100 m 以上),仅使用全站仪难以在同一地点对两者进行全方位的测量,故采用 GPS 差分测量系统辅助建立本地坐标系。在两座望远镜之间,设置了G1点和G2两个GPS测量点。 G1点位于主建筑前,G2点位于主建筑楼顶,两点位于两望远镜之间,在平面上两点的连线大致上与两望远镜中心点的连线垂直,并且有高度差,有助于后期对望远镜上的测量标志点进行定位和坐标换算。使用 GPS 接收设备在 G1 和 G2 两点进行了测量。最后拆卸三脚架上的 GPS 设备并以圆棱镜代替,用于后续的全站仪测量。
在两座望远镜周围尽量均匀地选取多个全站仪测量位置,用于对两座望远镜的标志点进行测量。考虑地形地物的因素,测量位置应能观测到望远镜标志点和两个GPS测量点而不被遮挡。在 A 镜附近设置三个全站仪观测点,B 镜附近设置四个全站仪观测点。图1中,A1-A3点位于A镜东南北三个方向,受场地限制,A 镜西侧找不到合适的观测位置;B1-B4 点位于 B 镜东西南北方向,其中 B2 点选择了密云站围墙外一个利于观测的开阔位置。
分别在 A、B 镜的座架和俯仰机构上布置反光贴片。在 A 镜上布置三枚反光贴片,座架的底部、中部各一片,俯仰框架上一片; B 镜布置四枚反光贴片,座架底部、中部和上部各一片,俯仰框架上一片,如图2所示。由于大型射电望远镜的俯仰机构巨大,为避免形变的影响,并避开齿条位置,反光贴片被置于传动齿条的末端。
1.2 测量工作的实施
首先在 G1、G2 两点架设三脚架,安装 GPS 接收设备,进行 GPS 差分测量,确定两点的相对位置关系。由于 GPS 天线单点坐标的绝对值并不准确,所以后续的坐标换算中并不使用这两点的绝对位置,只使用两点之间的距离和方向矢量。得到两点差分测量数据之后,将 GPS 设备替换为圆棱镜,供全站仪测量使用。
在 A1-A3、B1-B4 的七个观测位置上分别使用全站仪进行观测。(1)架设全站仪,调整水平和设置观测模式。(2)对参考点 G1、 G2 点进行测量,确定全站仪的观测位置。(3)利用事先布置的反光贴片对望远镜进行测量,下面详述第三步的具体过程。
随着望远镜指向不同的方向,使用全站仪不断进行测量。以 A 镜为例,从方位角 0° (0°时指向北方)开始旋转,每次旋转 30°;在每一个方位角都调整天线的俯仰角,从 20° 到 50°,以 5°为间隔进行调整和测量。可以得到由方位架上两个贴片的旋转轨迹组成的两个圆,所在平面均与方位轴垂直,且圆心都在方位轴上。同时能够得到一系列俯仰架(俯仰齿条)贴片的运动轨迹,这些轨迹点分布于一个球面上,且其球心应为望远镜的运动中心,半径则是从运动中心到贴片的距离。与 A 镜类似,B 镜的观测点将会组成三个方位圆环和一个球面。
在 2017 年 11 月 11 日至 11 月 13 日对 A 镜 B 镜分别进行了测量,共得到 402 个测量点,其中 A 镜测点 135 个,B 镜测点 267 个。
2 望远镜中心点的位置计算
2.1 数据的本地坐标系转换
首先把七个测量位置得到的数据点统一到以 A1 为原点的本地坐标系中。对于从 A2、 A3 以及 B1、B2、B3 和 B4 6 个观测点得到的观测数据,利用 G1、G2 点作为参照进行坐标转换。由于各测量位置的距离较近,不考虑地球的椭圆度,仅将本地坐标看作一个 x 轴指向北方,z 轴指向本地天顶的空间直角坐标系。
2.4 本地坐标及其到 ITRF2014 的转换
通过方位圆拟合和球面拟合,可以得到各个方位圆的圆心以及中心球面的球心。这些圆心的 x 和 y 坐标以及球心的三维坐标都可看作是对天线中心在本地坐标系下的测量和计算结果。为得到准确的天线中心位置,对圆拟合和球面拟合数据进行不同的权重分配,最终得到 A 镜和 B 镜的坐标:
为了得到B镜在常用的地心坐标系中的位置,需要将其与参照物 A 镜)的位置关系从本地坐标系转换到地心坐标系,这里采用国际协议地球参考系统 (International Terrestrial Reference System, ITRS)坐标系的具体实现框架 ITRF(International Terrestrial Reference Frame)。ITRF2014 是新一代的地球参考框架,由国际地球自转与参考系统服务(International Earth rotation and Reference systems Service, IERS)维持与定期更新。这种坐标架构同时兼顾了大地测量和天文观测的需求,并且利用了多种技术和全球的多个台站联合进行测定。
坐标变换包括两次变换。第一次旋转,使得本地坐标系中的z轴的反方向单位向量(即重力的方向)与 ITRF2014 内本地重力方向重合。由于 ITRF2014 的坐标系中 z 轴与地球自转轴重合,故采用 A 镜的位置坐标计算向心加速度,且与引力加速度做差即可得到本地重力加速度。第二次旋转,将 GPS 测量点 G1、G2 连线的向量 G12 通过旋转变换转化到 ITRF2014 参考架当中,旋转本地坐标系使得本地坐标系内的向量 G12 与 ITRF2014 内的 G12 重合,对两座望远镜在本地坐标系下的坐标也做相同的转换。两镜中心位置连线矢量在本地和 ITRF2014 坐标系下的位置,以及两镜在 ITRF2014 下的绝对位置如表 3 所示。
作为参照的 50 m 望远镜在 2014 年进行过精确的 VLBI 定位,其在 ITRF2014 下的坐标以及通过计算得到的 40 m 望远镜的坐标如表 2 所示,测量精度为 2.3 mm(RMS)。
3 结语
使用参照物的望远镜中心测量方法是一种简单易行的望远镜中心点坐标测量方法,对场地和仪器的要求都很低,无须特别的准备工作并能在一至几天之内快速完成。在不具备传统的 GPS 测量方法所需条件,或者短期内难以开展 VLBI 测量时能够给出毫米级精度的望远镜中心点位置。满足了一些工作对望远镜中心点位置的需求,并为后续的更高精度的精密测量提供一个初始值。
本次工作由于仪器设备和场地限制,采用了一些近似方法,如能设置更多的 GPS 测量点,或者延长全站仪测量的时间,增设测量项目,应能取得更高精度的数据。
对于小范围内有多个望远镜的观测站,这种方法可以减少望远镜位置测量对设备的依赖,简单快速地利用已知的参照物进行位置测定。密云站后续的多项工作也表明本次测定位置较为准确,满足了这些工作的需求。——论文作者:
参考文献
[1] LI Jinling, QIAO Shubo, LIU Li, et al. Site Survey at Sheshan 25m Radio Telescope in 2008[J]. GEOMATICS AND INFORMATION SCIENCE OF WUHAN UNIVERS, 2010, 35(12):1387-1391(李金岭, 乔书波, 刘鹂, et al. 2008 年佘山 25m 射电天线归心测量[J]. 武汉大学学报 ( 信 息 科 学 版 ), 2010, 35(12):1387-1391).
[2] LI Jinling, XIONG Fuwen, YU Chenglei, et al. Local Survey of Shanghai Tianma 65-m Radio Telescope[J]. Prog Astron, 2014, 32(2): 246-258(李金岭, 熊福文, 余成磊, 等. 上海天马 65m 射电望远镜归心测量[J]. 天文学进展, 2014, 32(2): 246-258).
[3] DONG Guangliang, XU Dezhen, FAN Min, et al. Overview of precise station position determination technology for deep space interferometry antennas and its prospect[J]. Journal of Spacecraft TT&C Technology, 2016, 35(4): 249-257(董光亮, 徐得珍, 樊敏, 等. 深空干涉测量天线高精度站址测量技术现状及展望[J]. 飞行器测控学报, 2016, 35(4): 249-257).
[4] SHEN Yunzhong, CHEN Tingwu. Determination of Space Coordinate Differences of Co-Location Sites in Shanghai Observatory[J]. Journal of Tongji University(Natural Science), 2006, 34(2):217-220(沈云中,陈廷武.上海天文台并址站的空间归心测量[J].同济大学学报(自然科学版),2006, 34(02):217-220).
[5] Nothnagel A, Wirtz C, Sauerbier M, et al. Local Survey at the Effelsberg Radio Telescope1997-Preliminary Results[C]//Proceedings of the 13th Working Meeting on European VLBI for Geodesy and Astrometry, BundesamtfürKartographieund Geodäsie, Wettzell. 1999: 25-31.
[6] ZHANG Ali, XIONG Fuwen, ZHU Wenyao. C-Location Survey at Xinjiang Astronomical Observatory 25m VLBI and GPS Station[J]. Journal of Geodesy and Geodynamics, 2015, 35(4): 680-683(张阿丽, 熊福文, 朱文耀. 新疆天文台 25m VLBI、GPS 归心测量[J]. 大地测量与地球动力学, 2015, 35(4):680-683).
[7] Lösler M. New mathematical model for reference point determination of an azimuth-elevation type radio telescope[J]. Journal of Surveying Engineering, 2009, 135(4): 131-135.
[8] LI Jinling , ZHANG Jinwei. Simulation Analysis of Monitoring of VLBI Antennas Reference Point via GPS Observations. GEOMATICS AND INFORMATION SCIENCE OF WUHAN UNIVERS, 2013, 38(12): 1387-1391 (李金岭,张津维. 利用 GPS 测量监测 VLBI 天线参考点的仿真分析[J]. 武汉大学学报 (信息科学版), 2013, 38(12): 1387-1391).
[9] Lösler M, Haas R, Eschelbach C. Automated and continual determination of radio telescope reference points with sub-mm accuracy: results from a campaign at the Onsala Space Observatory[J]. Journal of Geodesy, 2013, 87(8): 791-804.