发布时间:所属分类:科技论文浏览:1次
摘 要: 摘要:设计开发了BDS/GPS双系统五频点高精度接收机,其能为用户提供水平定位精度2cm的位置服务,可广泛应用于林区规划、巡护、资源调查、火灾监测等领域。本方案的基带处理器和导航信息处理器采用内置双核ARM的FPGA相对传统的DSP+FPGA设计方案,可大大节省硬
摘要:设计开发了BDS/GPS双系统五频点高精度接收机,其能为用户提供水平定位精度2cm的位置服务,可广泛应用于林区规划、巡护、资源调查、火灾监测等领域。本方案的基带处理器和导航信息处理器采用内置双核ARM的FPGA相对传统的DSP+FPGA设计方案,可大大节省硬件面积,降低功耗。经实验验证,该接收机能够稳定地提供厘米级的位置信息服务。
关键词:北斗;高精度接收机;位置信息;林区;硬件方案设计
北斗卫星导航系统是我国考虑国家安全和经济社会发展需要,自主建设、独立运行的卫星导航系统,是为全球用户提供全天候、全天时、高精度定位、导航和授时服务的国家重要空间基础设施[1]。目前,正在运行的北斗二号系统已免费向亚太地区提供公开服务。随着北斗系统的建设和服务能力的提升,其相关产品已广泛应用于很多行业,并向着更小、更准、更节能的方向发展。
本研究设计了一种优于传统方案的高精度接收机硬件方案,其摒弃了以FPGA作为基带处理器,而是以DSP或ARM作为导航信息处理器的方法。以双核FPGA为基础架构,将基带处理单元、导航信息处理单元和RTK解算单元集成在一个芯片上,通过与接收机软件联机测试,达到了预期的性能指标。
1北斗高精度接收机总体方案设计
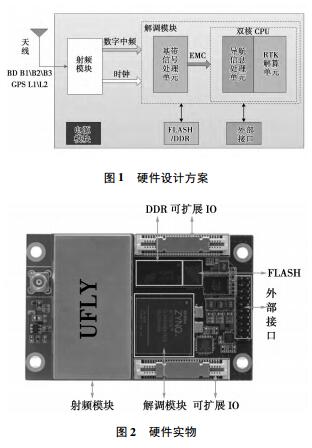
北斗高精度接收机(以下简称接收机),通过天线接收BDS(BeiDouNavigationSatelliteSystem)B1、B2、B3频点和GPS(GlobalPositioningSystem)L1、L2频点的卫星信号,再应用射频模块分别对各个频点进行放大、变频及滤波处理,最终输出数字中频和采样时钟到解调模块。解调模块内置双核ARM处理器的FPGA芯片,包含基带信号处理、导航信息处理及RTK(Real-timekinematic)解算三个单元。
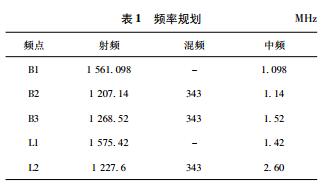
基带信号处理单元完成对中频信号的捕获、载波和码相位高精度跟踪[2];导航信息处理单元完成对观测量的提取、导航电文解析和单点位置解算;RTK解算单元使用伪距和载波完成实时载波相位差分运算。最终通过外部接口将位置、速度、时间等信息发送到用户端。硬件设计方案及硬件实物分别如图1、图2所示。
2射频模块设计射频模块需要完成对BDS的B1、B2、B3频点和GPS的L1、L2频点五路信号的下变频,本方案选用MAX2769B芯片。MAX2769B芯片为新一代单芯片全球导航卫星系统(GNSS)接收机射频芯片,用于GPS、GLONASS、伽利略以及北斗导航卫星系统。因为B2、B3、L2频点不在MAX2769B的频率牵入范围,因此这三个频点需要经过混频器后再通过射频芯片进行下变频处理。整个设计方案的频率规划见表1。
3解调模块设计解调模块设计如图3所示。
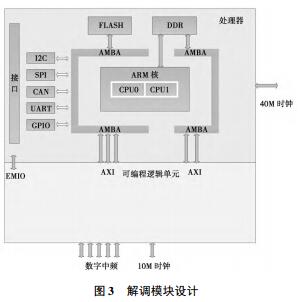
传统接收机的基带信息处理单元主控芯片一般选用FPGA,导航信息处理单元和RTK处理单元主控芯片一般选用DSP或者双浮点的ARM[3-4]。本次设计解调模块的三个处理单元使用一片内置双核ARM的FPGA作为主控芯片,其为Xilinx公司的ZYNQ-7020芯片。
3.1基带信息处理单元
基带信息处理单元的信号捕获是在片上的可编程逻辑单元上完成,通过AXIEMC总线与CPU0进行数据交互。接收机基带处理单元的时钟输入为经过射频模块锁相处理的10M低相噪时钟,可编程逻辑单元内部锁相环可将10M时钟分别进行倍频、分频处理[5-8],以满足AD采样及各个子单元对时钟的需求。
3.2导航信息处理单元
导航信息处理单元在片上的内核CPU0上运行,由外部40M时钟驱动,通过AXIEMC总线与可编程逻辑单元交互,外接高速的DDR3,通过AMP模式与CPU1进行交互。具有丰富的外部接口,包括2个UART、1个CAN、1个SPI、1个I2C等,并且有大量的IO可供使用,使用时可任意配置成上述接口。
3.3RTK解算单元RTK解算单元
在片上的内核CPU1上运行,通过AMP模式与CPU0交互。运行主频最高可达到866MHz,并且支持双浮点运算。完全可以满足实时载波相位差分大数据量运算的需求,经实测,主频360MHz即可达到10Hz的解算速度。
4实验测试与验证
为验证本方案的可行性及软硬件设计的正确性,需要对接收机的观测量、静态定位、动态定位进行性能测试[9]。
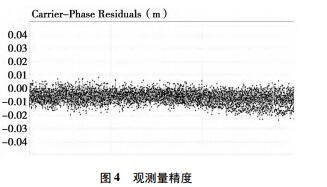
4.1观测量精度测试
观测量精度如图4所示,接收机的载波测量精度优于2cm,满足载波相位差分的需求。
4.2静态短基线测试
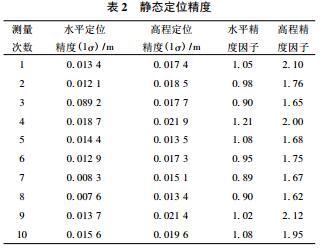
在由北京测绘局标定的3个标准点上进行试验,基线长度为10m,每隔30min启动一次测量(第3min上电,27min后测试设备断电),人工记录每次上电27min定位结果、PDOP值和有效标志等。统计了10次测量的水平和高程定位精度,水平定位精度优于2cm,高程定位精度优于3cm。静态定位精度见表2。
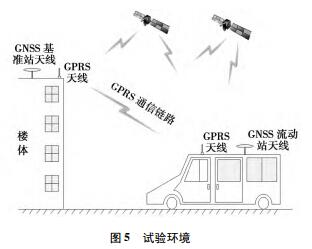
4.3动态长基线测试
使用测试车辆进行动态跑车试验,试验环境如图5所示。将NovatelDLV3基准站天线放置在标准点,接收天线架于测试车顶通过功分器输出两路信号,一路接被测接收机,另外一路接NovatelDLV3流动站。跑车路线为北京市北清路西段及周边路段。定位精度评估时以NovatelDLV3载波相位差分的定位结果为基准。
统计一天当中5个时段的动态定位结果,水平定位精度优于3cm,高程定位精度优于4cm。动态跑车、接收机在运动过程中会受到建筑物、树木遮挡等影响,导致被测机与参考机相对定位精度比静态测量时偏差大,但接收机仍能满足厘米级定位精度。动态定位精度见表3。

试验表明,开发的北斗高精度接收机硬件不但可以完成对卫星信号的捕捉、跟踪,还可以提供高质量的载波观测量,实时载波相位差分别达到了水平3cm、高程4cm的定位精度。
5小结
本设计提出了采用单一通用芯片作为基带、导航和RTK处理器的北斗高精度接收机方案,并完成了硬件设计、制作,以及测试软件的开发。试验结果表明,本设计方案可以满足载波相位差分的定位精度,能够达到预期的设计指标,在林区规划、巡护、资源调查、火灾监测等方面具有广阔的应用前景。
参考文献:
[1]北斗卫星导航系统介绍[EB/OL].2017-03-16.http://www.beidou.gov.cn/.
[2]GangulyS.Real-timedualfrequencysoftwarereceiver[C].PositionLocationandNavigationSymposium.IEEE,2003:366-374.
[3]魏秀启,郑维广,隋绍勇.北斗导航定位接收机的原理及硬件实现[J].电子元器件应用,2009(4):37-39.
[4]黄芳.基于DSP+FPGA系统的北斗接收机信号处理板的设计[J].信息通信,2015(7):62-62.
[5]戴志军,柳林涛,许厚泽,等.GPS软件接收机捕获算法的研究[J].大地测量与地球动力学,2006,26(3):106-110.
[6]AkopianD.FastFFTbasedGPSsatelliteacquisitionmethods[J].Radar,SonarandNavigation,IEEEProceedings,2005,152(4):277-286.
[7]李成豪,梁超,赵燕东,等.森林消防车微环境实时监测系统设计与开发[J].林业机械与木工设备,2018,46(3):10-14.
[8]贾鹤鸣,杨泽文,宋文龙.基于中心差分卡尔曼滤波的初始对准方法研究[J].森林工程,2016,32(6):66-70+76.
[9]吴泽民,边少锋,向才炳,等.三种GNSS模糊度解算方法成功率比较[J].海洋测绘,2014,34(6):25-28