发布时间:所属分类:计算机职称论文浏览:1次
摘 要: 摘要:m,_lk机器人自20世纪60年代初问世以来,其研究、开发及应用一直受到企业与科学家的关注,广泛应用于化工成产、设备安装、道路施工、机械制造、凿岩采矿等诸多领域。随着.x-,_lk机器人的发展,越来越重视将视觉系统应用到工业机器人上。本文主要进行图像处理,针
摘要:m,_lk机器人自20世纪60年代初问世以来,其研究、开发及应用一直受到企业与科学家的关注,广泛应用于化工成产、设备安装、道路施工、机械制造、凿岩采矿等诸多领域。随着.x-,_lk机器人的发展,越来越重视将视觉系统应用到工业机器人上。本文主要进行图像处理,针对二值化分割,目的在于后续求得工作质心与角度。因本实验工件与背景色的问题,先进行普通闽值二值化处理得到的结果令人并不是很满意,所以结合具体情况,对算法进行优化,采用基于6色调的黑白化处理。最后,先做工件最后的定位分析和求解工件摆放角度。
关键词:工业机器人;机器视觉;图像处理
本实验机器人需要抓取的工件成品Logo模具和作业环境如图1所示,其尺寸为长26em,宽18cm,高 8em,所使用的机器人型号为JLRB020。
作业环境如图1所示,处于室内桌台上,桌上的黑色十字标记用于校正上方摄像头的远近与倾斜角度,最重要一点,工件与工作台的色调差别尽可能大,因此本作业选用深绿色的面板供工件摆放。本课题基于广东某模具公司示教机器人生产线的背景下㈣,均依赖于规范化的流水线,或搬运工人需按指定的要求与位置进行工件的摆放,这种固化的抓取流程都是采用示教执行,通用性、灵活性很差。因此,本次任务的研究目标为消除对工件摆放的要求,让抓取的机器人会自适应的侦测目标工件的位置,并改变机械抓抓取的角度进行工件抓取。
1实现原理步骤
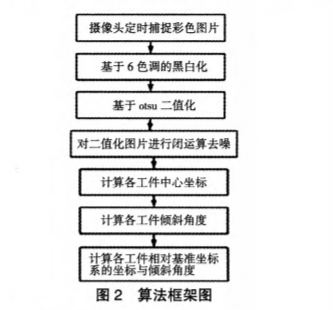
本次任务的实现逻辑如下:首先基于阈值分割来提取目标工件在图像中的位置,在彩色摄像头拍摄得到图片后,先将彩色图转换为黑白图片,进行二值化分割,为方便后续计算工件中心坐标和角度等工作。所以在本文中彩色图像在本算法后期并不重要。
1.1基于6种色调的黑白化
彩色图像转成黑白的方法也是多种多样,在此尝试了一些主流算法。然而彩色图像的二值化处理一般先进行灰度处理。
灰度处理一般常用的有三种算法:最大值法、平均值法、加权平均值法。公式与效果如下:
(1)最大值法:新的颜色值尺=G朝=max(R,G,B),通过这种方法处理得到的图片亮度看起来非常大。
(2)平均值法:新的颜色值兄=G胡=(R+G船)/3,采用平均值法处理得到的图片显得非常柔和。
(3)加权平均值法:新的颜色值R=G=B= (R术形r+G:I:Wg+B*Wb),我们知道不同人群对颜色的敏感程度是不一样的,因此三种颜色值的权重也不一样,通常来讲绿色较高,红色其次,蓝色最低,比较合理取值为Wr=30%,Wg=59%,Wb=l 1%。
该黑白化算法的输入参数为工件台上方摄像头捕获的图像,并对图像从左到右,从上到下进行遍历,对每个像素点的RGB三个分量进行排序。先找出最小值,若此像素RGB最小分量为红色,判定即当前色调权重为蓝与绿的混合色,即青色,同时为最大色调匹配上权重,如此类推,最后套用公式(1)计算灰度值,重复以上步奏直到遍历完图像所有像素。
从图3和图4可以看出降低绿色权重黑白化得到的效果明显优于普通黑白化处理。
目前的阈值确定方法有很多,其中较常用也是效果较好的方法是Otsu最大类间方差算法。因此,本文选取Otsu二值化算法来确定全局阈值。
其中,p(x,y)为A(x,y)处的像素值,大于r的值都被设置为255,小于r的值都被设置为O。通过otsu 方法后,将得到图6的效果。另外,在二值化之后,尽量进行闭运算等去除噪点的算法,再投入到后续的识别工作中。
1.3求取各工件中心坐标和摆放角度
在获得图6后,使用形态学中的闭运算去除毛刺与背景的干扰噪点即可获得工件准确的轮廓。在获得最佳轮廓图后,可将图片投入到最后环节,即求取工件质心与倾斜角度。
对于捕捉工件中心坐标的方法,在此本文基于图像二值化后再进行最大连通域搜索的算法。搜索完连通域之后,接着排序连通域面积,排序的时候,我们需设定一个阈值,对产生的噪点去除掉,因这个阈值的设定要求十分宽松,在此不赘述。排序完后,给序列表中的不同连通域赋予不同颜色的标记,接着把不同颜色村春在不同颜色的图像容器中,如此一来可将不同工件区别开来,给后续计算质心带来便利,效果如图7所示。
由公式可看出,我们只需要利用公式(4),求的 Mm,%,,‰即可代人到公式(6)中,求得最后的质心。重复此算法,对分割开来的图像进行求解,即可得到不同工件的质心坐标,此坐标与黑色标记点将成为上方机械抓的移动方向与距离。
机抓下潜抓取工件时,需要旋转勾爪,使其正确啮紧工件的两侧。因此需要计算工件的摆放角度,本实验使用霍夫变换求取工件的底座直线方程。
该算法实质是找出图像中所有满足某Y=m3c+c 直线的像素点,最终求出m与c。首先对直线方程进行坐标系变换,变成c=叫m+Y,在变换坐标系后,原来直角坐标系的点将变成直线,假若这些点均属于Y=mx+c的方程,则在极坐标系中,该类点所代表的直线均将相交于点(m,c),算法的最终目标即找出该类直线所相交的点。如图8霍夫线变换原理图。
相关论文还可以查看:基于机器视觉的表面缺陷检测研究综述
2结束语
本实验对工业机器人引入视觉系统方案,对工件进行图像处理和定位。考虑到工件与背景色差,工件摆放角度问题,分别采用6种色调黑白化、基于 otsu二值化方法对图像处理,实验结果表明,处理得到的图片改善非常大,定位精准。——论文作者:周衍超1,罗浩彬2
参考文献:
[1]丁炼.面向模具行业的机器人制造单元通讯机制与控制系统研究[D】.广州:广东工业大学,201 1.
[2】毕辉.可重构机器人制造单元控制系统设计与实现[D】_广州:广东工业大学,2013.