发布时间:所属分类:计算机职称论文浏览:1次
摘 要: 摘 要:在玉米育种和品质研究中,经常需要对玉米的果穗长度、果穗宽度、穗行数、穗粒数等参数进行测量。该研究提出了一种基于机器视觉的玉米果穗参数图像测量方法。使用 PC 摄像头连续采集旋转台上的玉米果穗图像,经过图像处理,获得玉米穗的图像区域,进而得到玉米果
摘 要:在玉米育种和品质研究中,经常需要对玉米的果穗长度、果穗宽度、穗行数、穗粒数等参数进行测量。该研究提出了一种基于机器视觉的玉米果穗参数图像测量方法。使用 PC 摄像头连续采集旋转台上的玉米果穗图像,经过图像处理,获得玉米穗的图像区域,进而得到玉米果穗的穗长和穗宽参数;通过对玉米果穗局部区域的 x 方向和 y 方向累计像素值曲线进行分析,提取出玉米穗行,获得每一穗行的穗粒数和穗行宽度;通过图像匹配,获得玉米果穗的穗行数。试验表明, 使用该研究方法对玉米果穗的长度、宽度和穗行数的参数测量准确率可达 98% 以上,对穗行宽及总穗粒数测量准确率达 95%以上,整穗的平均检测时间约 102 s/穗。该研究实现了玉米果穗参数快速有效的自动检测,相对于目前采用的人工检测,大大提供检测效率,降低劳动强度,可应用于玉米千粒质量检测、产量预测、育种和品质分析等场合。
关键词:图像处理;机器视觉;粮食;玉米果穗;参数测量;累计像素值分布
0 引 言
玉米是世界上分布最广泛的粮食作物之一,种植面积仅次于小麦和水稻。而中国是世界第二大玉米生产国,20 世纪 90 年代,常年播种面积 23.3~ 25.3×106 hm2 。在对玉米育种、栽培、新品种测试及品质评估等农业研究中,经常需要对玉米穗形状及数量参数(如穗行数、行粒数和千粒质量等)进行测量[1]。另外,对玉米产量的预测主要有遥感(remote sensing)预测[2-3]、模型预测 [4-7]、传感器预测[8]和田间取样预测等。其中,田间取样预测需要根据理论产量公式进行产量预估,在地块较小、缺乏历史数据或技术不完备的情况下,该方法非常简单有效。在玉米产量预测中,玉米理论产量(kg/hm2 )=公顷穗数×穗粒数×百粒质量(被测品种前 3 年平均数)×85%×10-5,因此穗粒数也是衡量玉米产量的主要参数。
目前,玉米的形状及数量参数的测量主要由人工完成,易导致人眼疲劳,影响检测效率和准确度。
机器视觉技术在近年来有了很大发展,其应用已渗透到农业生产的各个领域。例如,使用机器视觉对农作物生长情况进行监测,对农产品的品质进行检验,对田间施肥、中耕等作业进行管理或控制等[9],也出现了一些基于机器视觉的谷物外观检测和种子千粒质量检测的试验装置设计[10-12]。在国外,Gunasekaran 等[13-14]使用机器视觉检测玉米等谷物的外部物理损伤和霉变。Panigrahi 等[15-17]使用机器视觉检测谷物的尺寸。Majumdar 等[18-20]使用机器视觉对谷物种类进行识别分类。在国内,包晓敏等[21-25]利用机器视觉和图像处理技术对大米外观品质进行检测。杨华东等[26-28]研究了粮食颗粒检测的图像处理算法。韩仲志等[29]以玉米穗横截面为目标,使用图像处理的方法统计玉米的粒行数。
上述研究都是对玉米进行脱粒后检测,或对玉米果穗进行切割后检测,可检测的形状及数量参数相对较少。本研究设计较低成本的试验装置直接对玉米果穗进行各种参数的快速图像检测,包括玉米穗长、穗宽、穗行数、行粒数和穗粒数等,为玉米育种和玉米产量估计提供依据。
1 试验设备
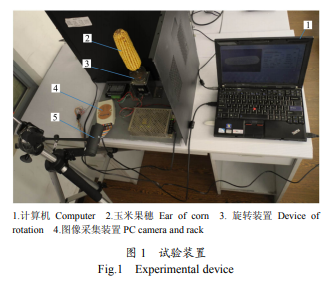
试验设备包括:计算机、数据采集与控制模块、玉米果穗旋转装置和图像采集装置,如图 1 所示。其中,计算机的配置为:CPU U5400,主频 1.2 GHz,内存 2G。数据采集与控制模块采用北京中泰研创科技有限公司生产的 USB7503。图像采集装置包括 PC 摄像头和可调节支架,PC 摄像头使用 Intel 公司生产的 CS630。玉米果穗旋转装置由步进电机、电机驱动器、24VDC 电源和机械部分组成。选用北京精工成有限公司的两相混合式57BYG250型步进电机和 SD-225M 型驱动器,步距角为 1.8°,有 8 种细分方式,输出驱动电流为 0.6~1.7A。机构部分包括底座、果穗连接件和其他固定安装部件。其中,底座用于固定步进电机、电机驱动器和电源,底座下方装有 4 个橡胶垫,用于减振;果穗连接件将玉米果穗与步进电机的转轴连接起来,并且使果穗轴心线和步进电机转轴尽量一致。
USB7503 模块和PC 摄像头通过USB 接口与计算机相连,PC 摄像头固定在调节支架上,可进行高度和角度调节。步进电机以 4.5°/s 的速度驱动旋转台逆时针带动果穗旋转,PC 摄像头按照设定方法采集果穗图像。图像背景使用黑色,通过调整 PC 摄像头的距离和方位,使玉米果穗在水平方向尽可能大而且完整、清晰地呈现在图像中央。
2 测量算法
在测量前,通过相机标定,求出单位像素对应的实际长度(标定值),记做 K(mm/像素)。
本研究根据玉米果穗上籽粒间缝隙灰度值较小的特点,通过分析累计像素值曲线上的凹点,寻找籽粒间的缝隙,从而获得玉米果穗主要参数。
2.2 确定玉米果穗区域
将采集到的彩色图像转变成 R(red)、G (green)、B(blue)3 帧灰度图像。由于 G 帧图像相对于背景比较清晰,因此对 G 帧图像采用大津法进行二值化处理,之后对二值图像进行去噪和补洞处理,得到后续处理的二值图像。
首先对二值图像进行轮廓追踪处理[30],获得最长轮廓线的外接矩形坐标。将该矩形区域作为玉米果穗图像处理区域,记作 S1。如图 2 所示,S1 的长度记为 Dx,高度记为 Dy,S1 左上角坐标为(xs,ys),右下角坐标为(xe,ye)。则当前整个果穗的像素长度 Li = Dx,果穗长度的检测值 Lm =Dx×K。
有的果穗存在秃尖,为避免秃尖部分对后续穗粒数检测产生影响,需要判断果穗是否存在秃尖,如果存在,则将秃尖部分去除。本研究利用秃尖处果穗直径较小的特点,设玉米轮廓上具有相同 x 坐标且距离为 Dy /2 处的 2 点,其 x 坐标为 xs′(如图 1 所示,其中矩形区域为 S1,椭圆代表玉米轮廓),若|xs′−xs|大于 Dy /4,则认为玉米果穗存在秃尖,将图 1 中线 x=xs′左侧部分从 S1 区域去除,剩余区域作为 S1 的修正区域 S1′。
2.3 单个玉米穗行提取与测量
由于图像的中心位置最清晰,因此本研究通过旋转果穗,使每一穗行都依次旋转至中心穗行位置进行提取。
由于玉米穗的中间偏根部的籽粒排列相对较好,因此选取玉米穗处理区域中心在水平方向距离根部 Dx/4 处为提取的起始点 C,图像坐标为(xc, yc)。点 C 处的穗行称为中心穗行。将果穗外轮廓与直线 x=xc的 2 个交点之间的距离作为当前果穗像素宽度 Wi,则果穗宽度的检测值 Wm=Wi×K(mm)。
以点 C 为中心,取一区域 S2,作为处理区域,其 x 方向宽度记为 Sx,y 方向宽度为记为 Sy(本研究设 Sx为 40、Sy为 0.8Dy),如图 3 所示(矩形区域为 S2,椭圆表示玉米籽粒)。将直线 xc 与点 C 所在的中心穗行上下边缘的交点记作 A 和 B 点,其坐标记为(xc, ya)和 (xc, yb)。
根据式(1),对以 C 点为中心的 S2 区域的 Fx(y) 曲线进行凹点分析。用式(3),取 D=3,获得 Fx(y) 的平滑曲线 Fxs(y)1;取 D= 0.4Sy+1,获得 Fx (y)的趋势曲线 Fxs(y)2。比较曲线 Fxs(y)1和 Fxs(y)2,获得多个凹点,并计算凹点平均距离 Dpr。将相邻距离小于 Dpr/2 的凹点剔除,剩余凹点中在 y 方向距离 yc 最近的上下 2 个凹点的 y 坐标作为 A 点和 B 点的 y 坐标,即 ya和 yb(其中 ya
同理,以 B 点(xc,yb)为起始已知点,使用相同的方法可获取当前玉米穗行的下边缘点的坐标。最后,根据玉米穗行上下边缘点的坐标信息提取出上下边缘限定范围的玉米中心穗行图像。
在图像中,依次将具有相同 x 坐标的玉米中心穗行上下边缘的 y 坐标值相减,即可获得该穗行任意处的穗行宽。试验中,本研究将[xc−Dx/8,xc+Dx/8] 处的平均穗行宽度作为该穗行的像素宽度 Wri。该穗行的穗行宽检测值 Wrm= Wri×K。
相关知识推荐:计算机视觉图像处理论文怎么发表ei期刊
对于所提取的单个玉米穗行图像,由于籽粒缝隙的像素值相对籽粒图像低很多,因此曲线上凹点对应玉米籽粒缝隙。根据式(2),本研究对每一幅提取出的玉米穗行图像,在图像区域 S1′中对 y 方向累计像素值曲线 Fy(x)进行分析,使用式(4),对其 D=3 的平滑曲线 Fys(x)1 与 D=Ri/3 的趋势曲线 Fys(x)2 进行比较,获得曲线上凹点的位置及个数 Npc,并计算凹点平均距离 Dpc。在分析凹点过程中,由于穗行两端不如中间段整齐,本研究从处理区域 S1 的宽度中心处开始向左和向右分别扫描;
3 结果及分析
3.1 试验方法
本研究采用的图像分辨率为 640×480 像素,标定值 K=0.4215。
在试验中,共随机选取无大面积缺粒或霉变的新鲜玉米和干燥玉米各 20 个,使用本研究的算法,在室内使用台灯灯光,进行玉米果穗形状及数量参数检测。使用卡尺对每穗的穗长和穗宽进行 5 点检测,并求平均,作为其实际值。机器视觉的检测结果与实际值之差的绝对值占实际值的比值视为误差率 Re,则准确率 Ra=100%−Re。
3.2 结果与分析
图 5 为玉米果穗连续提取穗行时获取 A 点和 B 点时的 2 种情况,每例的右侧为玉米图像,左侧表示 S2 区域中 Fx(y)的平滑曲线 Fxs(y)1 和趋势曲线 Fxs(y)2,以及表示凹点位置的脉冲曲线 R。从图 5 中可以看出,使用 x 方向累计像素值曲线 Fx(y)的平滑曲线 Fxs(y)1 和趋势曲线 Fxs(y)2 来判断凹点,可有效去除曲线 Fx(y)上的毛刺干扰和倾斜引起的误判。由于获取 A 点和 B 点只需要区域中间的两处凹点,因此图 5 中的图 a 和图 b 均有效判断出 A 点和 B 点。同理,应用该方法也可有效提取玉米穗行和分割玉米籽粒。
新鲜样本的试验数据如表 1 所示,干燥样本的试验数据如表 2 所示,而穗行数的检测值范围为12~20,准确率为 100%,在表中未列出。
分析试验结果,果穗长度、宽度和穗行数检测比穗行宽和穗粒数检测的平均准确率要高。而穗行宽的检测误差主要是因为其图像单个像素误差占穗行像素宽比例较大,可通过提高图像分辨率来改善。穗粒数的检测误差主要是因为大部分果穗根部的籽粒排列过于凌乱。比较新鲜玉米和干燥玉米的检测结果,果穗长度、宽度、穗行宽度和穗行数的检测结果均相差不超过 1%,但新鲜玉米穗粒数检测精度比干燥玉米低 3.29%,主要是由于新鲜玉米籽粒缝隙不明显,使其籽粒检测误差增加。试验中,整穗的平均检测速度为 102 s/穗。
4 结 论
1)使用机器视觉的方法获得玉米果穗图像,通过二值化和去噪、补洞处理,可有效提取玉米果穗处理区域及果穗长和果穗宽参数。
2)应用累计像素值平滑曲线和趋势曲线判断凹点的方法可准确判断出对应玉米中心穗行缝隙的凹点,并有效提取中心穗行,同时可获得穗行宽和中心穗行上的穗粒数。
3)以首次提取的玉米穗行的下边缘点为参考点,通过判断相邻穗行下边缘与参考点的接近程度,并通过图像匹配,可准确地连续提取所有的玉米果穗穗行,从而获得玉米果穗的穗行数和玉米果穗的总粒数。
4)试验证明,本算法对玉米果穗长度、果穗宽度和穗行数的检测准确度较高,在 98%以上;穗行宽度及穗粒数检测平均准确率为 95%以上;整穗的平均检测速度为 102 s/穗。 ——论文作者:刘长青 1 ,陈兵旗 2※
[参 考 文 献]
[1] 连艳鲜,何金环.高产玉米杂交种产量构成因素和穗部性状研究[J].安徽农业科学,2007,35(24):7430 -7431. Lian Yanxian, He Jinhuan. Study on the yield component factors and ear characters of high-yield maize hybrid[J]. Journal of Anhui Agri, 2007, 35(24): 7430-7431. (in Chinese with English abstract)
[2] Shanahan J F, Schepers J S, Francis D D, et al. Use of remote-sensing imagery to estimate corn grain yield[J]. Agronomy Journal, 2001, 93(3): 583-589.
[3] Lobell D B, Asner G P, Ortiz-Monasterio J I, et al. Remote sensing of regional crop production in the Yaqui Valley, Mexico: Estimates and uncertainties[J]. Agriculture Ecosystems Environment, 2003, 94: 205- 220.
[4] Potgieter A B, Hammer G L, Doherty A, et al. A simple regional-scale model for forecasting sorghum yield across North-Eastern Australia[J]. Agricultural and Forest Meteorology, 2005, 132(1/2): 143–153.
[5] Ju Weimin, Gao Ping, Zhou Yanlian, et al. Prediction of summer grain crop yield with a process-based ecosystem model and remote sensing data for the northern area of the Jiangsu Province, China[J]. International Journal of Remote Sensing, 2010, 31(6): 1573-1587.
[6] Becker-Reshef I, Vermote E, Lindeman M, et al. A generalized regression-based model for forecasting winter wheat yields in Kansas and Ukraine using MODIS data[J]. Remote Sensing of Environment, 2010, 114(6): 1312-1323.
[7] MKhabela M S, Bullock P, Raj S, et al. Crop yield forecasting on the canadian prairies using MODIS NDVI data[J]. Agriculture & Forest Meteorology, 2011, 151(3): 385-393 .
[8] Yuan Yanwei, Zhang Xiaochao, Hu Xiaoan. Study on a harvester navigation and yield analysis system[J]. New Zealand Journal of Agricultural Research, 2007, 50(1/2): 1117-1123.
[9] 王斌,刘兴龙,刘永福,等. 机器视觉技术在农业应用中的研究[J]. 农机化研究,2008(9):162-164. Wang Bin, Liu Xinglong, Liu Yongfu, et al. Research on technology of machine-vision in agriculture application[J]. Journal of Agricultural Mechanization Research, 2008(9): 162-164. (in Chinese with English abstract)
[10] 凌云,王一鸣,孙明,等. 基于机器视觉的大米外观品质检测装置[J]. 农业机械学报,2005,36(9):89-92. Ling Yun, Wang Yiming, Sun Ming, et al. A machine vision based instrument for rice appearance quality[J]. Transactions of the Chinese Society for Agricultural Machinery, 2005, 36(9): 89 - 92. (in Chinese with English abstract)
[11] 张巧杰,王一鸣,凌云,等. 稻谷品质检测技术与装置研制[J]. 现代科学仪器,2006,16(1):128-130. Zhang Qiaojie, Wang Yiming, Ling Yun, et al. Detection technology and an apparatus for grain quality[J]. Modern Scientific Instruments, 2006, 16(1): 128 - 130. (in Chinese with English abstract)
[12] 陈静,朱伟兴,苏威. 基于机器视觉的种子千粒重测定系统的设计[J]. 传感器与微系统,2008,27(9):97-99. Chen Jing, Zhu Weixing, Shu Wei. Design of determination system of mass of 1000 grains based on machine vision[J]. Transducer and Microsystem Technologies, 2008, 27(9): 97-99. (in Chinese with English abstract)