发布时间:所属分类:工程师职称论文浏览:1次
摘 要: 正确认识锅炉应用及运用措施有哪些?如何发挥锅炉的应用价值呢?又该怎样去控制锅炉的能力呢?在当下新的工程管理中对锅炉的建设管理有什么影响呢?本文做了以下总结。文章发表在:《宁夏工程技术》杂志上。本文杂志是介绍有关科技工程建设等各方面的信息。 摘要
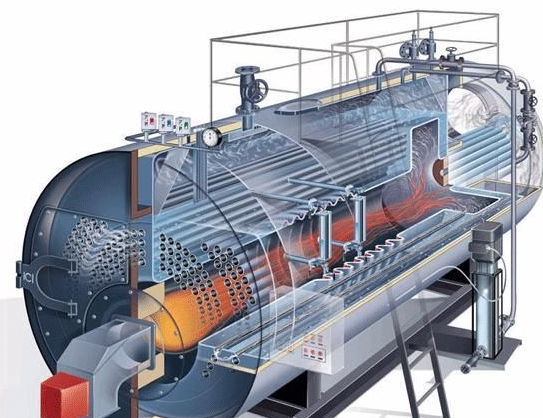
摘要:锅炉是一种能量转换设备,向锅炉输入的能量有燃料中的化学能、电能,锅炉输出具有一定热能的蒸汽、高温水或有机热载体。锅的原义指在火上加热的盛水容器,炉指燃烧燃料的场所,锅炉包括锅和炉两大部分。锅炉中产生的热水或蒸汽可直接为工业生产和人民生活提供所需热能,也可通过蒸汽动力装置转换为机械能,或再通过发电机将机械能转换为电能。提供热水的锅炉称为热水锅炉,主要用于生活,工业生产中也有少量应用。产生蒸汽的锅炉称为蒸汽锅炉,常简称为锅炉,多用于火电站、船舶、机车和工矿企业。
关键词:模糊控制,锅炉,工程技术
1控制系统方案设计将锅炉汽包水位控制系统作为主要研究内容,汽包水位是锅炉运行论文中的一个重要参数,它体现出锅炉产生的蒸汽量和给水量之间的动态平衡关系,是锅炉安全运行的重要条件。汽包水位高会使过热器的受热面结垢而被烧坏;而汽包水位过低则会破坏汽水循环,造成水冷壁管供水不足而被烧毁,甚至引起锅炉爆炸。锅炉水位自动控制的任务就是控制给水流量,使其适应蒸发量的变化,维持汽包水位在允许的范围内。将模糊控制算法引入该系统,利用模糊控制易于实现对复杂对象控制的特点,将有经验的操作人员和专家的控制经验应用于控制过程,根据人工控制规则组织控制决策表,然后由该表决定PID参数的输出值,与传统的PID控制相结合,根据锅炉汽包水位运行过程中出现的不同状态和扰动,在线实时的对PID参数整定,使系统运行中保持合适的瞬态参数,易于维持汽包水位在设定值。针对锅炉汽包水位控制系统特点,将蒸汽流量作前馈信号和给水流量作控制信号,设计了三冲量控制系统。
论文网推荐:《宁夏工程技术》,《宁夏工程技术》是由中华人民共和国新闻出版总署、正式批准公开发行的优秀期刊。自创刊以来,以新观点、新方法、新材料为主题,坚持"期期精彩、篇篇可读"的理念。宁夏工程技术内容详实、观点新颖、文章可读性强、信息量大,众多的栏目设置,宁夏工程技术公认誉为具有业内影响力的杂志之一。宁夏工程技术并获中国优秀期刊奖,现中国期刊网数据库全文收录期刊。1.1锅炉汽包水位的三冲量控制方式。汽包水位采用三冲量控制,将蒸汽流量作为前馈信号,把给水流量作为控制信号,组成汽包水位的三冲量控制系统。
1.2系统硬件配置。控制器主要由PLC构成,采用西门子300PLC为开发平台。输入输出系统采用分布式I/O(ET200M),通过输入输出模块将现场采集的信号送入到PLC控制器。
目前,我国现有很多工业和民用中小型锅炉,其中大部分自动控制水平很低,存在燃烧不彻底、排烟氧含量偏高、排烟热损失大等问题,直接造成了锅炉热效率低下和大量能源的浪费,同时也给环境带来很大的污染,所以实现锅炉的计算机控制具有重要的意义。采用西门子300PLC为开发平台,设计模糊自整定PID控制器应用于工业锅炉控制系统克服了锅炉控制系统的大惯性、非线性等特点,并结合PID控制稳态精度高的特点,使控制系统有良好的控制效果。在研究模糊控制与传统PID控制相结合的基础上,以工业锅炉为对象,设计了一套完善、实用的自动控制系统。
2模糊自整定PID控制器设计
2.1设计原理。模糊自整定PID控制算法是在PID算法的基础上,以误差e和误差变化量ec作为模糊控制器的输入量,以满足不同e和ec对控制器参数的不同要求,根据模糊合成推理设计PID参数的模糊矩阵表。在锅炉汽包水位控制系统中,输入变量选择为汽包水位的偏差值。和偏差值的变化量ec,输出变量选择为PID参数的校正值,即△kp,△ki和△kdd。在模糊自整定PID控制器中,采用的是二维模糊控制器。
2.2模糊控制器设计过程的四个步骤
2.2.1构造系统结构,根据采样得到的系统输出值,计算所选择的系统的输入变量。该步骤所完成的工作就是确定模糊控制器的输入量和输出量。
2.2.2“模糊化”,即实现输入量或输出量的模糊化,通过量化因子和比例因子将精确量变化的范围(基本论域)模糊化成在模糊集论域范围内。我们可以把精确量用“正大”“、正中”“、负中”“、负小”等模糊语言来分成数个档。这些档的大小关系我们就用在模糊论域上的模糊子集来表示。而模糊子集的大小就和隶属函数有关,隶属函数通常采用:三角形隶属函数、正态分布隶属函数和梯形隶属函数等。不同的隶属函数代表着不同的系统特性,我们一般在系统误差较大时采用具有低分辨率隶属函数,而在系统误差较小时采用具有高分辨率的隶属函数。
2.2.3模糊控制表的运算合成,有了前两个步骤的工作,得到输入量和输出量的模糊数,结合操作经验或数据,我们就可以将输入量和控制量的模糊数安排到由一系列的if-then控制规则组成的集合中,利用这些规则信息,采用极大极小值合成法或其他合成算法,我们就可以合成得到控制表。该控制表储存于计算机中,供程序查询输出。
2.2.4查询输出和输出量精确化,计算机控制程序通过查询该控制表,即可以找到对应于某模糊数输入量的控制量模糊数,再通过输出量比例因子将模糊输出控制量转换成进行控制量的精确化输出,这实际上是在一个输出范围内,找到一个被认为最具有代表性的、可直接驱动控制装置的确切的输出控制值。
2.3模糊自整定PID控制算法在PLC中编程实现。模糊自整定PID控制算法在西门子300PLC上采用语句表编程方式编程实现。采集误差信号和误差变化量信号,将其模糊化到语言变量的论域,采用离线计算的方式将模糊规则制成模糊查询表,通过在线的方式查询模糊控制量输出,最后将PID参数校正值与基准值相加,获得PID参数瞬时值,最后进行PID运算,计算得控制量到控制对象执行器。在PLC中,使用FB功能块和DB数据块来实现模糊控制算法。首先离线计算好模糊关系查询表,把比例因子值、误差的上下限值和模糊关系查询表R送到DB数据块中存储起来。在DB数据块中,模糊关系R要按倾序排放,即按顺序先输入第一列,再输入第二列,第三列,然后在FB功能块中完成计算查询表功能。值得注意的是,在这里采用取整将E单点模糊化,然后,由模糊化子集和模糊关系风求出模糊决策。在程序里,这部分使用比较指令和循环嵌套来完成。最后,用最大隶属度法,由模糊决策求出△kp,△ki,△kd,再进行PID增量式运算得输出控制量。
3结论根据锅炉控制系统的特点,分析了锅炉汽包水位控制系统的控制任务及控制目标,针对工业过程中出现的非线性、大滞后、强耦合、难于控制的工业锅炉控制对象的特点,在传统PID控制器难以达到理想控制效果的前提下,结合当前发展比较迅速的模糊控制理论,使用模糊控制理论和PID相结合的控制器来改造原有的ID控制方式,结合PID控制中稳态精度高的优点,设计了模糊自整定PID控制器,实现了PID参数的在线自整定,使系统保持最优的瞬态参数,使模糊控制与PID控制有机的结合起来,易于达到满意的控制效果。