发布时间:所属分类:科技论文浏览:1次
摘 要: 摘要: 针 对 220KV 高压输电线除冰机器人这一新的机器人应用领域, 提出了一套机器人运动控制系统方 案 。 实 现 了 一 种 基于开放式运动控制系统,该系统由工控机和运动控制卡组成,通过无线通讯控制除冰机器人的行走及越障动作,如 跨 越 防 震锤及悬垂线夹等。 从系统
摘要: 针 对 220KV 高压输电线除冰机器人这一新的机器人应用领域, 提出了一套机器人运动控制系统方 案 。 实 现 了 一 种 基于开放式运动控制系统,该系统由工控机和运动控制卡组成,通过无线通讯控制除冰机器人的行走及越障动作,如 跨 越 防 震锤及悬垂线夹等。 从系统的硬件既软件实现两个方面分别介绍了其运动控制的实现过程,实验结果表明该系统具有较高的可 靠 性、实时性及良好的人机交互性。
关键词: 除冰机器人; 高压输电线; 运动控制
1 引言
我国是输电线路覆冰最为严重的国家之一, 线路冰害事故发生的概率居世界前列,2008 年初我国南方的雨雪冰冻天气更是给电力设施带来灾难性的破坏, 数名电力工人在输电线路除冰过程中壮烈牺牲。因此,研究一种高度自动化的除冰机器人代替人工 除冰 对 于 保护 我 国 电网 的 安 全运 行 和 电力 工 人 的生 命安全具有极其迫切的现实意义。
目前除冰机器人已经成为机器人研究领域的一大热 点,文献结合输电 线 路 上覆 冰 的 去除 方 法 设计 了 一 种两 臂 式 除冰 机器人; 文献提出了一种新的输电线路除冰机器人越障方法并对其进行了运动学和动力学分析; 除冰机器人是在恶劣环境中对输电线路进行无损除冰作业,其结构、功能、动力、通信等方面都有特殊的要求,因此有必要对除冰机器人的本体、除冰装置、系统功能设计,软硬件实现等各个方面加以深入的研究。
而作为除冰机器人的一个重要部分, 运动控制系统性能将直接 影 响除 冰 机 器人 工 作 性能 及 可 操控 性。 本 文针 对 220KV 输电线路的结构特点,按照除冰机器人实际工作的要求,设计了一种结构清晰、层 次分 明、拓 展性 良 好 的输 电 线 除冰 机 器 人运动控制系统。
2 除冰机器人结构
目前,本文设计的除冰机器人采用的是三臂结构。它的本体主要由三个机械臂、挂线装置及除冰装置、本体舱等组成,其结构如图 1 所示。
在三个机械臂中:中间机械臂的肘关节可伸缩,其上安装有主驱动轮,主要用来驱动机器人的行进和保持机器人平衡;两侧机械臂的关节都是旋转关节,每个臂末端安装一个挂线装置,挂线装置配备有挂线轮和除冰装置,主要用于完成除冰工作和夹持电缆。
相关知识推荐:自动化机器人类论文发表指导
本体舱则是由动力箱、控制箱和电池箱三个部分组成。 除冰机器人采用混合动力方式供电, 机上搭载了一台汽油发电机和一块大容量电池, 它们的重量较大被分别安排在本体舱的两端。控制箱是除冰机器人控制系统的核心,工控机和众多的外围设备都被安放在其中。
3 除冰机器人的作业环境及控制目标
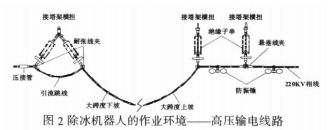
本文设计的除冰机器人主要用于 220KV 高压输 电 线 路的除冰作业。 220KV 高压输电线路是一种柔性较大、障碍复杂的工作环境, 其典型线路及障碍情况如图 2 所示, 它主要包括:直线、大跨度输电线上(下)坡、绝缘子、防 振 锤、各种 线 夹、引流 跳线等。 除冰机器人运动控制系统的主要控制目标可以概括为以下五个方面:(1)保证除冰机器人在柔性架空线上的平稳爬行,包括上下坡、制动、防滑、负载等各方面的问题;(2)避越绝缘子、防振锤、各种线夹(悬垂线夹、耐张线 夹 等)、压接 管、引 流线、线 塔等;(3) 保障机器人姿态平稳以及保持其它导线和线塔金属部件的安全距离;(4)保障除冰装置的平稳运行;(5)保证除冰机器人及其除冰装置在冰冻雨雪天气条件下良好运行。
4 控制系统功能设计
除冰机器人是一个复杂的自动化设备, 其驱动元件数量众多,包括了四大类总共 20 个电机,即除冰电机 2 个、驱动及关节电机 8 个、升降机重心调节电机 7 个、刹车电机 3 个。 且除冰机器人工作在柔性输电线路上,运动状态比较复杂,此外线路上存在很多障碍物并非都是典型结构, 而且机器人要长期在恶劣环境下工作,可能会出现许多预想不到的情况。 在这种情况下,为了保证机器人工作的稳定性和安全性, 其运动控制系统不但要具备对单个电机的稳定控制能力,而且也应该具备易操作性。因此,如图 3 所示,除冰机器人的运动控制系统分为两个部分,即远程监控端和机器人本体控制端。 它们之间通过无线方式实现双向数据传输: 一方面地面监控人员可以接收来自机器人的视频图像、探测传感器数据、机器人位姿状态、输电线路覆冰厚度和微气象等信息;另一方面,地面监控人员可以对机器人发出各种控制命令,指导机器人工作。
遥操作控制指令分为任务级指令和关节级指令两种: 其中任务级命令直接给机器人下达操作任务,例如翻越各种线夹,避让防震锤等,机器人根据事先编程的运动过程进行运动,完成任务;关节级命令是指直接对机器人的各个关节或功能单元进行控制。
5 控制系统硬件结构
控制系统整体硬件结构如图 4 所示
根据分级递阶的思想, 在硬件系统的设计上采用了三层结构,即远程监控层、机载控制层以及执行层。 远程监控层位于地面监控计算机, 主要负责观测机器人的工作状况及对其进行遥操作;机载信息管理与决策层和执行层位于机器人本体上,主要负责 现场 传 感 信息 的 实 时采 集、 各 种控 制 算 法的 具 体 实 现 及底 层运 动 控 制。 其 中 机 载信 息 管 理与 决 策 层的 功 能 由机 载 工控机实现,执行层的功能由嵌入式运动控制卡实现。 伺服电机组包括驱动、关节电机及刹车电机,开关电机组包括除冰电机、升降电机及重心调节电机。
地面 监 控计 算 机 和机 器 人 机载 工 控 机之 间 采 用 无 线 局 域网 通 讯 方式 进 行 传感 信 息 和控 制 指 令的 传 输。 机器 人 机 载工控 机 和运 动 控 制卡 采 用 基于 现 场 总线 的 分 布式 控 制 结构。 运动 控 制 卡 的 核 心 由 DSP 和 FPGA 组 成, 它 与 机 载 工 控 机 一 同构 成 了 一 个 开 放 式 运 动 控 制 系 统,即“PC+运 动 控 制 器”模 式。这样就将 PC 机的信息处理能力、开 放 式 的特 点 与 运动 控 制 器的 运 动 轨 迹 控 制 能 力 有 机 的 结 合 在 一 起, 具 有 信 息 处 理 能 力强、开放程度高运动轨迹控制准确、通用性好的特点。
6 控制系统软件
除冰机器人运动控制系统远程控制端如图 5 所 示,该 系 统采用 VC++.NET 平台编写,应用多线 程 机 制可 以 同 时对 多 个 电机进行实时控制,并且具备单个关节或者任务级控制能力。
如图 5 所示,该系统根据电机类型特点及其任 务 分工 设 计了五种关节级指令控制模块,即驱动电机控制、关节电机控制、前臂其它电机、中臂其它电机、后壁其它电机。
由于 在 除冰 机 器 人行 走 过 程中 要 使 用三 个 驱 动 电 机 并 行驱动,而在越障过程中则会根据具体情况选择其中两个驱动电机组合来驱动机器人行走,因此在驱动电机模块采用了复选框方式来实现电机运动组合,并且可以通过运动方向复选框来选择除冰机器人的运行方向,驱动电机的运行参数则可以通过其参数 设 置完 成。 除 冰机 器 人 关节 电 机 控制 一 般 在其 越 障 过 程中 使 用,在 这 个 模 块 中 关 节 电 机 采 用 单 个 电 机 控 制 模 式,通 过电机选择可以选择需要控制的关节,同时其运动方向可以通过关节电机运动方向确定。 此外,为了减少操作的难度,控制系统设计中尽量减少按钮的数量,除冰机器人的其它电机控制中采用单个按钮来控制电机的启停,按钮标签标示其运动形式。
同时,该控制系统还对于除冰机器人的一些行 为进 行 了 任务 级 指 令规 划,如 除冰 机 器 人 前 景、后 退、跨 越 防 震 锤、跨 越 悬垂线夹。
7 结束语
本文所设计的除冰机器人运动控制系统能够对其各个电机进行稳定的实时控制,机器人在实验中运动灵活可靠,所设计的 开放 式 运 动控 制 系 统具 有 良 好的 抗 干 扰能 力 及 良好 的 可 拓展性。下一步将完成除冰机器人的传感系统,使其具备环境及自我感知能力,为自主控制提供基础。——论文作者:王 聪 孙 炜 向阳琴
参考文献
[1]张屹, 邵威, 高虹亮等. 高压输电线路除冰机器人的机构设计 [J]. 三峡大学学报(自然科学版), 2008, 30(6): 69 - 72.
[2] 侯文琦, 王剑, 马宏绪, 刘建平. 输电线路除冰机器人机构设计与动力学仿真[J]. 机械与电子, 2009, (10): 52 - 55.
[3]上海市电力公司. 220KV 及以上典型线路杆型装置图[M]. 北京: 中国电力出版社, 2005.
[4]孙鑫, 余安萍. VC++深入详解[M]. 北京: 电子工业出版社, 2006.
[5]景晨, 李硕. 北极冰下自主/遥控机器人控制系统设计[J]. 微计算机信息, 2009, 3-2: 253-255.