发布时间:所属分类:科技论文浏览:1次
摘 要: 摘要:测绘成果的精度检测是测绘生产技术流程的必要环节。采用三维激光扫描仪获取激光点云数据,基于点云从数学精度、地理精度两方面检测测绘成果的质量:在点云中识别提取对应的地物平面坐标、高程注记点高程值,量取地物点间距,生成测绘成果数学精度的统
摘要:测绘成果的精度检测是测绘生产技术流程的必要环节。采用三维激光扫描仪获取激光点云数据,基于点云从数学精度、地理精度两方面检测测绘成果的质量:在点云中识别提取对应的地物平面坐标、高程注记点高程值,量取地物点间距,生成测绘成果数学精度的统计表;基于点云立体交互检查地理要素的遗漏、表达准确性。该方法完善了三维激光扫描测绘生产技术体系,与传统检测方法相比,具有直观、客观、高效率等特点。
关键词:精度检测,测绘成果,三维激光扫描技术,数学精度,地理精度
精度检测是测绘成果质量检查验收的主要内容[1]。精度检测主要包括平面绝对位置精度、平面相对位置精度(地物点间距精度)、高程精度检测、地理精度检测。传统测绘成果精度检测过程复杂,包括架设仪器野外实测检查平面绝对位置精度、高程精度;现场采用皮尺或测距仪检查平面相对位置精度;现场巡视比对的方式检查地理精度。
三维激光扫描仪是测绘领域的新技术,获取的数据由点云和影像组成,不仅记录了地物地貌的坐标数据和尺寸信息,更能自动记录其拓扑信息、纹理信息[2],已在古建筑保护[3]、数字城市[4]、地形测绘等方面得到应用[5-7]。然而,其测绘成果的检测仍采用传统测绘成果检测方法[8]。
发明专利“地面激光扫描仪测量地形的方法”[9]采用地面三维激光扫描仪实现对大比例尺地形图的测量,使得外业测量效率与传统方法相比提高3~4倍,自动化程度显著提高,减轻了测量人员的外业工作量。本文在此基础上,系统全面地研究采用三维激光扫描技术检测测绘成果精度的方法,并验证其可靠性和效率。本方法与文献[9]的专利共同构成完整的三维激光扫描测绘生产技术体系。
1检测方案
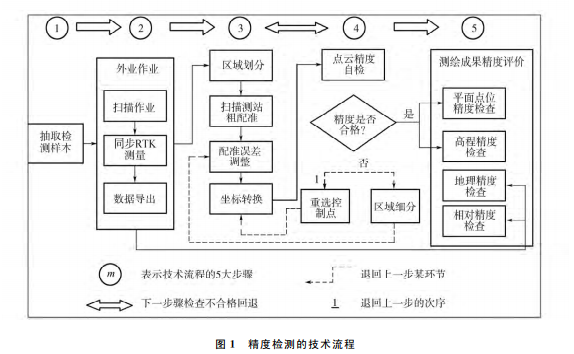
如图1所示采用三维激光扫描技术获取高精度点云数据[9],基于点云数据提取检查点、高程点等元素,检测测绘成果的精度。具体技术流程如下:1)抽取检查样本,选择拟检测地形图图幅,确定检查区域;2)采集检查区域点云及测站站心大地坐标;3)检查区域内各测站数据拼接及坐标转换;4)利用站心大地坐标对点云精度自检;5)采用检测合格的点云数据检测大比例尺地形图的平面绝对位置精度、高程精度、平面相对位置精度、地理精度。
2测绘成果指标及样本抽取
2.1检测对象选择2016年广州市某地形测绘项目的C作业区,检测对象为全野外数字化测图方法测绘的1∶500地形图,包含居民地、农田、池塘、植被、山地等典型地理要素。
2.2测绘基准及分幅标准采用广州市平面坐标系统、广州市高程系统,分幅标准采用广州市地形图分幅及编号。
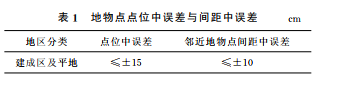
2.3地形图精度要求等高距采用0.5m,城市建筑区高程注记点相对于邻近图根点的高程中误差不得大于±15cm。其它地区高程精度以等高线插求点的高程中误差来衡量,平地和丘陵地的等高线插求点的高程中误差分别为1/3和1/2基本等高距。明显地物点相对于邻近控制点的点位中误差及地物间距要求见表1。
2.4检查样本按照国家标准[1]在待检测的地形图中抽取检查图幅,确定检查区域分布。
3高精度点云数据的获取
3.1外业数据采集
采用RieGLVZ400三维激光扫描仪及同轴GPS进行外业数据采集(仪器安置于汽车顶部)[9]。在抽取的图幅范围实施360°扫描(车辆制动),点云密度设为4~6cm(距离仪器100m处的点间距),扫描测站间的距离不宜大于50m。采用广州市GZCORS网络基准站,在满足RTK作业条件的区域,同步采用GPS-RTK测量站心大地坐标。本案例在该作业区地形图质量检测中共扫描测量86站,其中GZCORS-RTK同步测量62站。
3.2点云拼接及坐标转换
为了减小拼接累积误差,本文对较大区域细分,使细分测块内测站数控制在5~30个测站以内,按照测块分别进行点云拼接和坐标转换。由于本文旨在地形图的精度检测,不存在制图接边问题,所以区域划分不需要沿河流、道路划分,增加了区域划分的自由度。
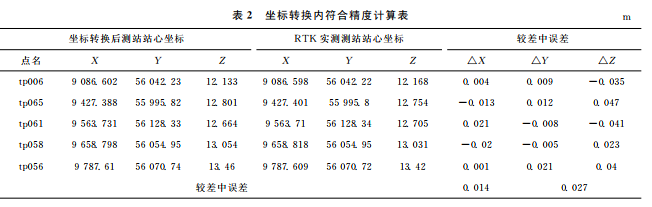
各分块内测站配准,先选择一个视野开阔的测站,作为固定的基准测站,其他测站两两依次拼接。拼接分为两个步骤:粗拼接和拼接调整。粗拼接选择4个同名地物点,拼接残差在1~6cm以内。拼接调整采用ICP算法,提高匹配精度[10]。在测块周边和中心选择5个已测大地坐标的站心点,将测块点云转换到大地坐标下[11],转换后内符合精度计算结果见表2。
4测绘成果精度评价
利用自检合格的点云数据进行测绘成果平面绝对位置精度、高程精度、平面相对位置精度、地理精度的检测。
4.1平面绝对位置精度
采用拟合提取特征点比对坐标的方法检测平面绝对位置精度,实施步骤:1)点云按照平行于XOY面水平剖切,参照点云的完整性选择剖切处的点云高度,切片厚度1~2cm,得到切片点云;2)在切片点云中检索拟检测地形特征点的近邻域点云;3)采用鲁棒迭代最小二乘算法基于近邻域点云拟合地形特征点[12]:step1对近邻域点云采用最小平方中位数法选择拟合的直线模型;step2将该直线模型作为初始模型迭代调用最小二乘法,通过逐渐剔除异常点,不断精炼模型,得到最终精确的直线模型;step3删除直线模型拟合所采用的点云,利用剩余点云再次执行a、b。
当剩余点云数目少于某设定阈值时,停止迭代;step4拟合得到一组直线模型;step5计算直线的彼此交点,一般房屋、围墙等角点的近邻域内只会得到两条直线;如图2所示当近邻域内出现多个交点时,选择距离拟检测地形特征点最近的点作为比对点。图2切片点云拟合特
5结论
本文基于三维激光扫描技术提出测绘成果的数学精度、地理精度的检测方法,并在生产实际中验证其可行性、可靠性。该方法不仅可以应用于三维激光扫描技术测绘成果,也可用于传统测绘手段获取的测绘成果。
与传统精度检测方法相比,本检测方法的外业检查人员在车内遥控扫描作业,减轻作业强度,提高作业效率,对于检测出的错误可以直观表现,便于检查人员与测图人员沟通以及测绘成果错漏的进一步修改。
随着激光扫描技术在测绘领域的普及应用,本文提出的检测方法具有广阔的应用前景。Landsat-8的分类结果更接近于真实值;针对混合像元少,纹理和细节更加复杂的土地利用类型,GF-1的结果更好。
对于GF-1图像,虽整体精度很高,但在很多区域分类结果的面积均大于Landsat-8,导致可分离性高结果却有偏差,后续研究中应利用DEM、纹理特征、多时相数据等进行后处理,进一步提高分类精度。
参考文献:
[1]李智峰.高分一号卫星在土地利用遥感监测中的应用[J].国土资源导刊,2015,12(3):85-88.
[2]陈文倩,丁建丽,王娇,等.基于高分一号影像的土地覆被分类方法初探[J].干旱区地理,2016,39(1):182-189.
[3]杨长坤,王崇倡,张鼎凯,等.基于SVM的高分一号卫星影像分类[J].测绘与空间地理信息,2015,38(9):142-146.
[4]王婷婷,李山山,李安,等.基于Landsat8卫星影像的北京地区土地覆盖分类[J].中国图象图形学报,2015,20(9):1275-1284.
[5]张超,李智晓,李鹏山,等.基于高分辨率遥感影像分类的城镇土地利用规划监测[J].农业机械学报,2015,46(11):323-329.
[6]林雪,彭道黎,黄国胜,等.结合多尺度纹理特征的遥感影像面向对象分类[J].测绘工程,2016,25(7):22-27.
[7]张杰,敖子强,吴永明,等.鄱阳湖滨湖区多季相Land-sat8OLI数据遴选及其土地利用/覆被遥感分类提取[J].江西科学,2017,35(1):79-85.
[8]杨珍,张永志,张文军,等.遥感影像解译样本的一体化生产研究[J].测绘工程,2016,25(7):7-17.
[9]邸向红,侯西勇,吴莉.中国海岸带土地利用遥感分类系统研究[J].资源科学,2014,36(3):463-472.
[10]李茂娇,杨斌,詹金凤,等.基于GIS的岷江上游流域土地利用/覆被变化研究[J].测绘工程,2016,25(6):41-45.
[11]谢士琴,赵天忠,王威,等.森林资源监测中GF-2卫星影像波段配准误差分析[J].测绘工程,2017,26(2):18-21.
[12]陈杰,邵权斌,梅小明,等.结合尺度空间的面向对象高分辨率影像城市道路提取[J].测绘工程,2016,25(12):5-12.
[13]李丹,杨金玲,张玉娟,等.基于RS/GIS的耕地资源变化特征分析[J].测绘与空间地理信息,2015,38(7):9-11.
测绘期刊推荐:《测绘学报》(国内统一连续出版物号:CN 11-2089/P,月刊)创刊于1957年,是中国科学技术协会最早创办的77种自然科学刊物之一,为EI核心收录期刊。现由中国科学技术协会主管、中国测绘地理信息学会主办。