发布时间:所属分类:科技论文浏览:1次
摘 要: 摘要:介绍了目前我国使用比较普遍的几种挖坑机,提出了一种将挖坑与植苗作业合二为一的新型挖坑造林一体机。通过对该机螺旋挖坑铲参数的相关研究,得知螺旋挖坑铲的重力变化是影响其受力的主要因素。运用Pro/E软件对挖坑造林一体机整机进行三维仿真,根据最
摘要:介绍了目前我国使用比较普遍的几种挖坑机,提出了一种将挖坑与植苗作业合二为一的新型挖坑造林一体机。通过对该机螺旋挖坑铲参数的相关研究,得知螺旋挖坑铲的重力变化是影响其受力的主要因素。运用Pro/E软件对挖坑造林一体机整机进行三维仿真,根据最优化原理对整机进行了运动模拟并加以分析,其可为今后挖坑造林一体机的改进提供参考。
关键词:挖坑造林一体机;螺旋挖坑铲;参数分析;仿真
挖坑机作为典型的林业生产设备,长期作业于恶劣的自然环境中,操作人员需要付出较大的体力劳动并承受较大的心理考验。国内挖坑机种类很多,但将挖坑和造林合二为一的机械还很少,为此笔者尝试设计了一种挖坑造林一体机。
我国目前普遍使用的挖坑机有悬挂、手提、自走、背负4种形式,大多适用于农林等基础行业[1]。
(1)悬挂式挖坑机:悬挂式挖坑机是由钻头、机架、减速器及传动轴等零部件组成[2]。挖坑钻头一般为螺旋式,动力一般由拖拉机提供,提升机构通常为三点悬挂式。为了充分利用并提高拖拉机的挖坑效率和功率,有的悬挂挖坑机上设有两个或两个以上的钻头,称为多钻头式挖坑机。钻头在工作时碰到障碍物会通过传动轴上的牙嵌式离合器自动分离,从而阻断动力传递使钻头停止运动,以避免钻头受损。悬挂式挖坑机具有挖坑直径大、成本低、工作效率高等特点,适用于地形比较平缓的地区。
(2)手提式挖坑机:手提式挖坑机是由操作装置、减速器、钻头、发动机、机架及离合器等零部件组成[3]。发动机采用柴油机,其为手提式挖坑机的动力装置。手提式挖坑机的钻头由刀片、钻尖、钻杆和导土片组成[4]。挖坑机的工作钻头在扭矩和轴向力的作用下垂直向下运动,被切下的土壤则沿导土片上升,运送至地表后排到坑外[5]。手提式挖坑机具有挖坑效率高、体积小、质量轻、便于拆卸等特点,可由单人或双人操作,适用于地形比较复杂的山地、丘陵及沟壑地区。手提式挖坑机在我国使用的比较普遍[6]。
(3)自走式挖坑机:自走式挖坑机是以拖拉机为动力并能够实现自主行走的一种农用挖坑机,具有挂接、传动方便,体积小,通用性好及工作效率高等特点,但挖坑成本较高。自走式挖坑机的驱动方式主要分机械与液压两种[7]。例如山西省农机研究所研发的3WY-40式挖坑机,其行走方式是液压式轮胎与挖坑机自身行走机构相结合的方式,而且具有独立的行走脚,能够在不同地形的情况下采用相应的行走方式[8]。
(4)背负式挖坑机:背负式挖坑机适用于单人操作,具有体积小、便于携带及操作方便等特点,适用于山地、丘陵及平缓地带的挖坑作业。该挖坑机可以进行坑深200mm以下的挖掘工作,通常用于各种植苗移栽类作业。背负式挖坑机的挖坑方式与手提式相同[9],为了保护钻杆,背负式挖坑机的钻头上还配有钻杆套和防护罩。钻头上一般还装有逆转机构以确保土壤被排出坑外。在发动机的位置上还装有防振架以防止挖坑机振动,工作人员在操作背负式挖坑机时需配备专用的防振护具。
上述4种常见的挖坑机以手提式和悬挂式在我国应用的比较普遍[10],但这些传统的挖坑机通常是采用类比或仿制的方式进行设计的,存在很大的盲目性和不合理性[11]。
1挖坑造林一体机的设计思路
为了使挖坑机操作人员保持充沛的体力和愉悦的心情,应通过机械或电子手段来降低挖坑机的振动及噪声,使其大幅减小,同时还要减轻挖坑机的质量及提高钻头的自主入土性能[12]。
在技术创新方面将挖坑与植苗工作一体化,挖坑机在挖坑工作完成的同时迅速切换工作盘,执行机构再将准备好的树苗植入坑中完成种植工作,这一改进也是国内外一直努力的研究方向。通过对国内外已有挖坑机及树苗种植方式的研究表明,这种改进在理论上是可行的。
与现有的技术相比,该挖坑造林一体机的创新之处在于集挖坑植苗等多种功能于一体,从整体上大幅度地增加了植苗设备的功用,从而提高了经济效益。将螺旋式挖坑部件与机械手部件组合起来,不但可以防止螺旋挖坑铲与机械手在整体结构中互相影响,而且还便于植苗设备的工作,减轻了植苗装置的质量,极大地方便了设备的运行,从而提高了工作效率与设备利用率。这种组合利用螺旋式挖坑铲和机械手的方式,可使设备的整体性能明显优于二者性能的简单相加,从而提高了设备的综合能力。
挖坑造林一体机通过运载装置运送至指定地点后,在可回转式升降机构和驱动挖坑植苗装置液压马达的操控下,调整螺旋式挖坑铲的位置,使挖坑铲垂直并接近地面,驱动螺旋式挖坑铲液压马达带动螺旋挖坑铲旋转,向下挖坑至指定深度60cm并停留20s,再向上运动至离开地面的合适位置,使驱动螺旋式挖坑铲液压马达停转,挖坑作业结束。
挖坑植苗装置由液压马达驱动旋转一定角度,使机械手正好位于工作位置,然后可回转式升降机构再通过驱动旋转台液压马达回转控制机械手到树苗的存储区域,机械手活塞杆张开抓取树苗后再通过升降机构回转带着树苗转到树坑上方,升降机构调整手爪的角度使树苗垂直向下正好放入挖好的树坑内,完成整个挖坑植苗工作。
2挖坑造林一体机挖坑铲参数研究
挖坑造林一体机配置螺旋挖坑铲时,应考虑挖坑工作时螺旋挖坑铲由于自身钻杆与土壤接触而产生的各种阻力,这些阻力会对螺旋挖坑铲产生轴向反作用扭矩,该扭矩会随着挖坑深度、土壤成分类型及气候湿度条件等的不同而不同;而且该阻力在工作过程中一直存在,其对可回转式升降机构的性能及寿命会产生不利影响;此外,螺旋挖坑铲的结构及工作参数对工作过程中的反作用力也有很大影响[13]。这次设计的新型挖坑造林一体机主要用于植树造林、挖坑埋杆等作业,因此要求螺旋挖坑铲在工作过程中不仅要满足上述要求,同时还要具有疏松土质的功能。
螺旋挖坑铲的结构及性能参数对挖坑铲垂直方向上受到的力和扭矩影响较大,只有通过对螺旋挖坑铲部分参数进行具体分析计算,才能得出所受的这些力与扭矩之间的关系及影响程度。
2.1变导程锥状正螺旋面数学模型
只有当“临界钻速”≤螺旋式挖坑铲的旋转速度时切削的土壤才能克服相关的反作用力而被运出坑外,而且螺旋式挖坑铲叶片在运送土壤时螺旋要自下而上逐渐变化,称之为变导程螺旋。运送土壤时对螺旋式挖坑铲的构造及其螺旋叶片的形态也有相关要求,即在进行不间断切割作业时螺旋挖坑铲的切削角度要保持不变,而且螺旋式挖坑铲叶片的形态需保证在其上任意一点的法线和螺旋挖坑铲的重心线夹角δ≤90°-Φ,Φ为挖坑铲叶片与土壤的摩擦角。
(1)变导程锥螺旋线的形成及参数方程。变导程圆锥螺旋线如图1所示
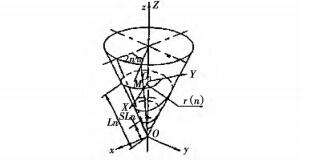
变导程锥螺旋运动是螺旋挖坑铲在工作过程中的一种复合运动,其实际计算十分复杂。为了便于分析研究,首先建立一个以挖坑铲螺旋中心轴为oz轴的空间坐标系oxyz,然后再建立一个动坐式中:SL0为初始位置(n=0)时M点的瞬时导程;n为转动的圈数;aL为动直线L的加速度。
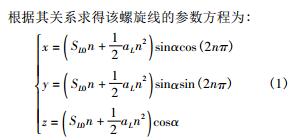
(2)变导程锥螺旋面的形成及参数方程。变导程锥螺旋面如图2所示
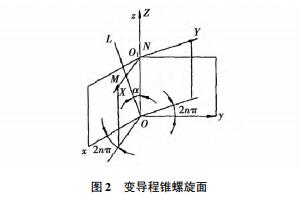
MN的运动轨迹所形成的曲面即为变导程锥形螺旋面。通过推导可得出所需的变导程锥螺旋面的参数方程为:
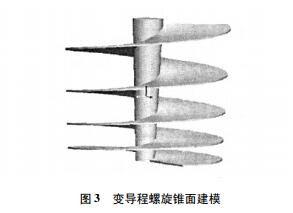
2.2变导程锥螺旋面钻头的参数化建模
通过Pro/E三维软件进行参数建模。由于螺旋式挖坑铲的关键部分为螺旋结构,所以需首先对挖坑铲的叶片进行参数化三维建模。运用Pro/E三维软件中的螺旋扫描功能得到所需的螺旋挖坑铲叶片部分的结构后,首先从零件图制作进入到草绘界面,然后选择基准线,输入螺旋线方程Sn=S1+a(n+1),最后通过螺旋扫描选项得到所需的三维模型,变导程螺旋锥面建模图如图3所示。
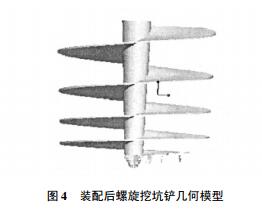
挖坑造林一体机作业时通常将螺旋挖坑铲的切削力适当分配至铲尖端,这样不但可以使螺旋挖坑铲能够更方便地钻入土壤中,而且还可以使切削作业变得更加顺利。
铲齿齿尖的空间坐标和三个方向的夹角决定了螺旋挖坑铲铲齿的具体位置。由于本文研究的螺旋式挖坑铲通常用于植树造林及挖坑回填等方面,螺旋挖坑铲长期是在相对松软的土壤环境中作业,在实际切削时挖坑铲的切削力与磨损的程度都不太大。因此在考虑铲尖位置和角度时只需考虑挖坑铲松土与切削两个方向即可,装配后的螺旋挖坑铲几何模型如图4所示。
2.3临界钻速确定
通过研究分析可知,只有确定螺旋挖坑铲的临界转速才能够顺利实现土壤的运送,如果螺旋挖坑铲的转速低于该速度则会导致土壤阻塞挖坑铲的叶片从而使土壤运送失败[14]。要对该临界转速进行确定,首先要对土壤运移规律和土壤受力等参数进行分析。
(1)螺旋挖坑铲叶片上土壤分布曲线函数。在螺旋式挖坑铲铲进过程中,挖坑铲叶片上的土壤由于离心力的作用将由内向外运动,从而使叶片上的土层厚度成为规则曲线。土壤微小单元体的受力分析如图5所示。
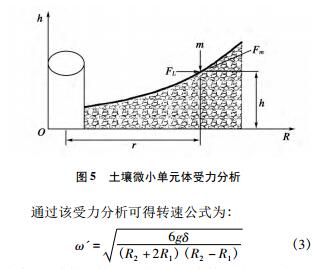
式中:R1为挖坑铲芯杆直径;R2为挖坑铲外缘直径;δ为土壤运送时的厚度。式(3)表明δ与螺旋挖坑铲的速度成正比。
(2)输送过程中土壤的受力分析。土壤随着螺旋挖坑铲叶片的转动,受到包括离心力FL、重力G及各种摩擦力的作用。土壤微小单元体输送过程受力分析如图6所示。
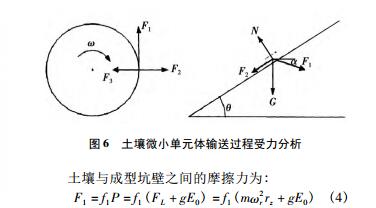
式中:f1为土壤和坑壁的摩擦系数;P为成型坑壁对土壤的反作用力;FL为离心作用力;E0为挡土墙侧压力;m为土壤质量;ωr为土壤转速;rz为土壤分布至中心位置的半径。土壤与螺旋挖坑铲叶片之间的摩擦力为:F2=f2N=f2[mgcosθ+F1sin(α+θ)](5)式中:f2为土壤与叶片的直接摩擦系数;θ为距轴心r处的螺旋升角;α为转速高于临界值时摩擦力F1方向改变产生的夹角。(3)螺旋挖坑铲叶片的临界转速推导。土壤与螺旋挖坑铲叶片之间的相对转速:ωN=ω-ωr=Kωr(6)式中:K为常数,一般取K值为0.2~0.3;ωr为土壤转速。
通过对挖坑造林一体机工作时可能存在的外载荷以及螺旋挖坑铲的受力进行参数确定,得到变导程螺旋面的基本算法以及临界转速确定的基本方法,分析表明挖坑铲运动过程中重力变化为其受力的主要影响因素。
3挖坑造林一体机的模拟仿真研究
3.1Pro/E软件模拟仿真流程利用Pro/E软件进行挖坑造林一体机模拟仿真的具体流程如下:
(1)根据设计的相关要求绘制出理想的液压传动机构简图。
(2)绘制零件图,完成后再通过装配模式完成各部分零件的连接。
(3)检查各部位连接准确成功后,设置相关运动的初始条件,如质量属性,定义伺服电机等。
(4)分析模型,包括位置、运动、力等方面的分析,取得分析结果。
3.2挖坑造林一体机模拟仿真
建立挖坑造林一体机三维模型,用于一体机的运动分析。设计的一体机由动力机构、可回转式升降机构、机架、螺旋挖坑执行机构等部分组成。新型挖坑造林一体机三维模型如图7所示。
运用Pro/E三维软件对一体机进行了相关仿真分析,通过仿真模拟出这种新型挖坑造林一体机的实际工作情况,其可为今后相关产品的研发提供结构及运动特征等方面的参考数据。
参考文献:
[1]王海涛,朱春生,安立周,等.工程机械配套使用植树挖坑机技术研究[J].机械制造与自动化,2014(1):192-195.
[2]张金玲,孙嘉燕.轻型挖坑机结构设计[J].农机化研究,2011(7):162-163.
[3]童庆辉.挖坑机造林使用效果分析[J].林业机械与木工设备,2011(9):31-33.
[4]赵忠松,卢博友,王天赐.基于ANSYS的悬挂式挖坑机钻头静力学分析[J].农机化研究,2010(6):87-89.
[5]戚开钊,裴新民,靳范,等.MS310型多功能果园作业机挖坑部件的结构设计[J].新疆农机化,2012(2):14-16.
[6]刘晋浩,王丹.谈国内外人工林抚育机械的现状及发展趋势[J].森林工程,2006(3):12-14.
[7]于建国,屈锦卫.国内外挖坑机的研究现状及发展趋势[J].农机化研究,2006(12):38-41.
[8]武广涛,俞国胜,李美华.国内造林机械及发展前景[J].林业机械与木工设备,2003(11):4-5.
[9]黄伟,娄玉印,韦宁,等.行走式植树挖坑机的工作原理及结构分析[J].农机化研究,2013(2):35-39.
[10]付健,李勇.浅析林业生态建设与发展[J].青年与社会,2013(8):259-259.
[11]娄玉印.新型挖坑机的有限元分析和虚拟样机仿真[D].南宁:广西大学,2012.
[12]刘百合.挖坑机的选型与使用[J].农业机械,2002(2):51-51.
[13]张红岩.旋挖钻机作业装置的动力学分析[J].筑路机械与施工机械化,2011(12):75-76.
[14]HongJialin,PavelTalalay,MikhailSysoev.Optimizationoficecuttingstransportationbycable-suspendedcoreaugerdrills[J].GlobalGeology,2014(1):48-54.